Distributors
CN / EN
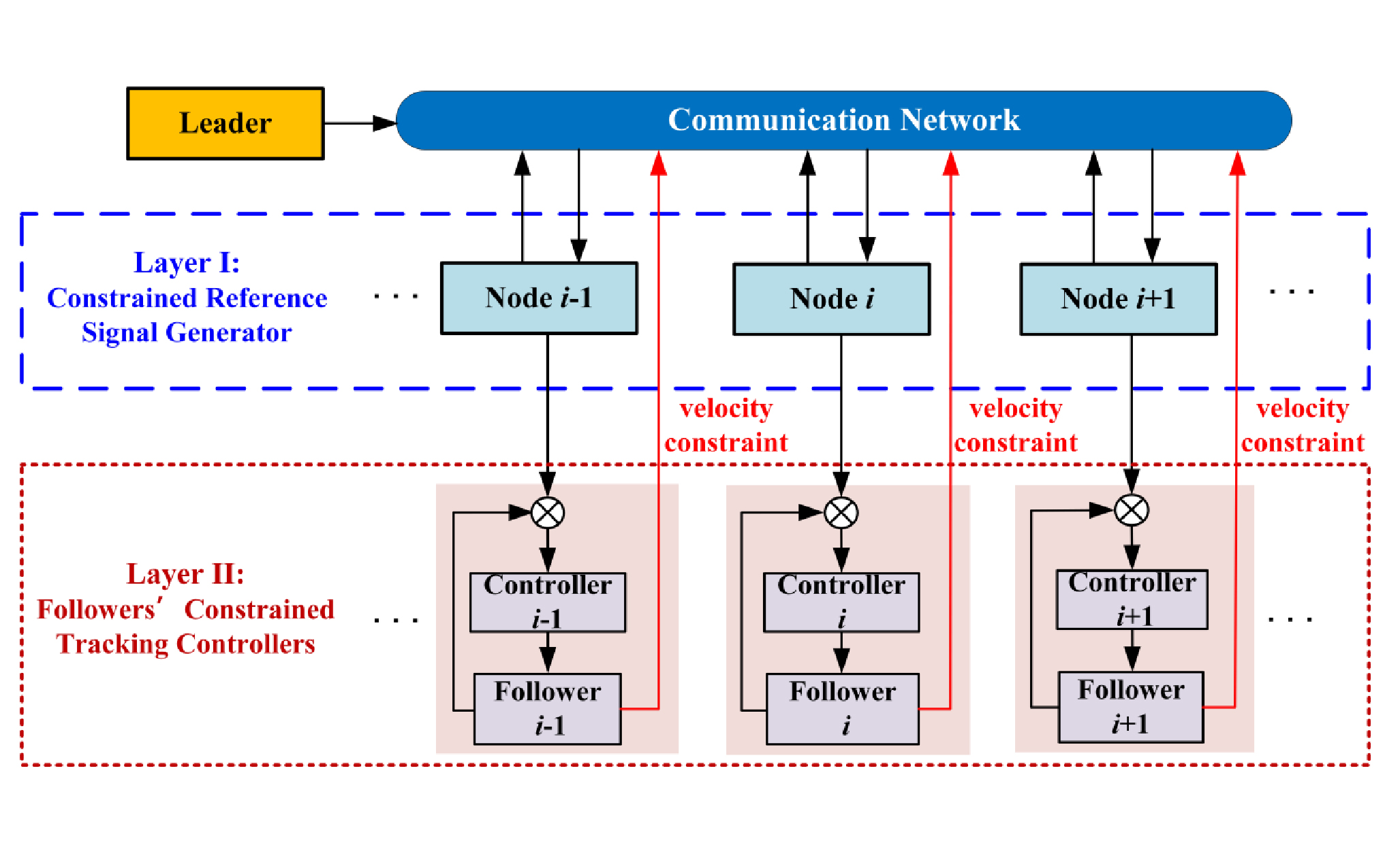
While single wheeled mobile robots (WMRs) are common in engineering transport, multi-WMR cooperative transport remains in research. Many traditional control algorithms are designed directly based on cooperative tracking errors, leaving room for improvement in complexity and flexibility.
The advent of embedded control technology offers a path forward. Professor Wang Xiangyu's team at Southeast University proposed a formation control algorithm for multi-WMR cooperative transport. The paper was published in the international control journal Control Engineering Practice.
In this research, the School of Automation at Southeast University used CHINGMU's MC1300 motion capture system to provide precise data support for multi-robot formation experiments. The system offers sub-millimeter positioning accuracy, capturing real-time motion information including position, heading angle, and trajectory of multiple mobile robots, providing an accurate reference for verifying hierarchical cooperative control algorithms.
During experiments, the mocap system simultaneously tracked one leader robot and three follower robots within a 3.8m × 4.5m space, outputting real-time 6-DoF pose data and recording every detail of robot formation. The high-value data effectively validated the proposed hierarchical control scheme, ensuring robots accurately formed a preset square formation, providing reliable experimental evidence for constrained second-order multi-agent system control research and advancing multi-mobile robot formation technology.
Research Achievements:https://www.sciencedirect.com/science/article/abs/pii/S096706612400162X



+86-21-56472866 / 13310099680
1190 Nong METACINE (South Gate), Building 1, CHINGMU, Zhengtai Road,Baoshan District, Shanghai
Hot searches: Motion capture, Optical motion capture, Motion capture system robot, Motion capture, Bionic robot, Motion control, Gait analysis, Rehabilitation training action assessment, Animation production, Virtual idol live streaming, Expression capture, Virtual production, Pre-visualization, Performance capture