Distributors
CN / EN
Research into distributed collaborative control for unmanned aerial vehicles addresses a broad range of practical operational challenges while driving advancement across related scientific and engineering disciplines — carrying significant implications and application value for military, civil, and research domains. UAV control inputs are frequently subject to amplitude and rate constraints, including actuator saturation and environmental operational requirements. These limitations pose substantial challenges to conventional UAV collaborative control algorithms.
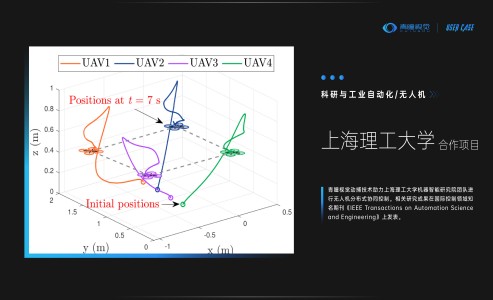
The research team at the Institute of Machine Intelligence, University of Shanghai for Science and Technology, investigated consensus control under input amplitude and rate constraints for multi-agent systems, with direct application to UAV collaborative control. The findings have been published in IEEE Transactions on Automation Science and Engineering, a leading international journal in the field of control engineering.
The team proposed a distributed control methodology integrating velocity damping and a novel nonlinear saturation function, achieving multi-agent state consensus without violating input amplitude or rate constraints. Leveraging the sub-millimeter localization accuracy and high-precision capture performance of the CHINGMU motion capture system, the team achieved real-time acquisition of UAV pose, flight trajectory, and motion state data — providing accurate data reference for algorithm validation and ensuring the authenticity and reliability of experimental results.
Experimental Configuration
Formation test volume: 2m × 2m
System components:
CHINGMU optical motion capture system
Four Crazyflie 2.1 quadrotor UAVs
One ground station running Linux OS
Control objective: Formation of a square configuration with 1.1m side length
Experimental results confirm that the UAVs rapidly achieved distributed collaborative formation, with the proposed algorithm producing markedly smoother flight trajectories and reduced overshoot compared to baseline approaches. Algorithm robustness against external disturbances was further validated: following successful formation establishment, one UAV was manually displaced from its designated position within the formation. The swarm demonstrated rapid recovery, re-establishing the target formation configuration without loss of coordination — confirming the resilience of the proposed control framework under perturbation conditions.



+86-21-56472866 / 13310099680
1190 Nong METACINE (South Gate), Building 1, CHINGMU, Zhengtai Road,Baoshan District, Shanghai
Hot searches: Motion capture, Optical motion capture, Motion capture system robot, Motion capture, Bionic robot, Motion control, Gait analysis, Rehabilitation training action assessment, Animation production, Virtual idol live streaming, Expression capture, Virtual production, Pre-visualization, Performance capture