
 CN / EN
CN / EN
Southeast University: Formation Control of Velocity-Constrained Multi-Wheeled Mobile Robots Based on

Formation Control of Multi-Wheeled Mobile Robots
In the field of autonomous systems, the formation control of Multi-Wheeled Mobile Robots (WMRs) has been a research hotspot, with widespread applications in practical tasks such as cooperative transportation. However, some existing research often inadequately considers the velocity constraints of WMRs or treats the linear velocity constraint and angular velocity constraint as two independent constraints. In reality, for differential-drive WMRs, the linear velocity constraint and the angular velocity constraint are two coupled constraints. Considering these two constraints separately will limit the WMRs from fully utilizing their motion performance. Furthermore, existing trajectory planning algorithms for WMRs are often based on optimization iterative methods, leaving room for improvement in aspects such as computational real-time performance.
To address the aforementioned issues, the Mechatronic Systems Control Laboratory team led by Professor Wang Xiangyu from the School of Automation at Southeast University conducted research titled "A Formation Strategy Relying on Monotrajectory Planning for Velocity-Constrained Wheeled Mobile Robots With Application to Cooperative Transportation". This research aims to explore how multiple WMRs under velocity constraints can transport goods from a starting point to a destination along a given path, thereby providing a more effective solution for multi-WMR cooperative transportation tasks. The research results have been published in the renowned control journal IEEE Transactions on Control Systems Technology: Quanwei Wu, Guodong Wang, Xiangyu Wang*. A Formation Strategy Relying on Monotrajectory Planning for Velocity-Constrained Wheeled Mobile Robots With Application to Cooperative Transportation. IEEE Transactions on Control Systems Technology, 2025, 33(6): 2080-2091.
I. Research Scheme:
The research team proposed a formation control strategy based on monotrajectory planning. This strategy comprises two core components: (1) A virtual leader part – A virtual leader is constructed using a feedback control method, considering a unified form of the linear and angular velocity constraints for the WMRs. This allows for planning feasible trajectories for all velocity-constrained WMRs without the need for iterative processes, significantly improving real-time performance. (2) A formation control part – Based on embedded control techniques, distributed reference signal generators and tracking controllers are designed respectively to ensure the WMRs accurately track the trajectories while forming and maintaining the desired formation.
Algorithm Advantages:
Good Real-Time Performance: The proposed strategy effectively achieves online trajectory planning through feedback control and coordinated control, eliminating the need for multiple iterations to find an optimal solution, thus possessing superior real-time performance.
High Efficiency: Compared to methods that do not consider velocity constraints, the proposed strategy not only considers the velocity constraints of all WMRs but also fully utilizes the mobility of the WMRs, enabling them to complete tasks faster.
Strong Engineering Applicability: The proposed strategy integrates the linear and angular velocity constraints into a unified velocity constraint form. Since both constraints are related to the motor speed constraints of the WMRs, this unified form can more accurately reflect practical engineering scenarios.
II. Experimental Validation:
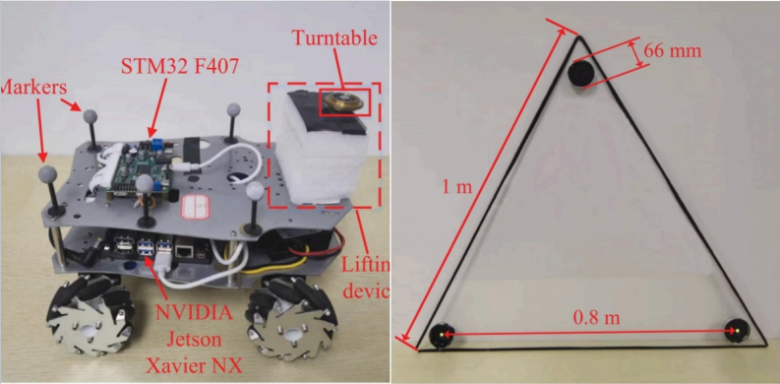
Experiments were conducted in a 3.8m × 4.5m area. The research team performed formation experiments and cooperative transportation experiments. The experimental setup consisted of a CHINGMU visual motion capture system, 3 WMRs, and a transportation platform. Each WMR was composed of a support device, a lower computer (STM32 F407), an upper computer (NVIDIA Jetson Xavier NX), and multiple markers. The task objective was for the WMRs to form an equilateral triangle with a side length of 0.8 meters and track the virtual leader. The function of the virtual leader was executed by WMR1. The transportation platform was set according to the desired formation of the WMRs, as an equilateral triangle with a side length of 1 meter. Specifically, the center of the equilateral triangle formed by the WMRs coincided with the center of the transportation platform, and its sides were parallel to the sides of the transportation platform. The starting point of the desired trajectory for the transported object coincided with the centroid of the WMR formation at the beginning of transportation.
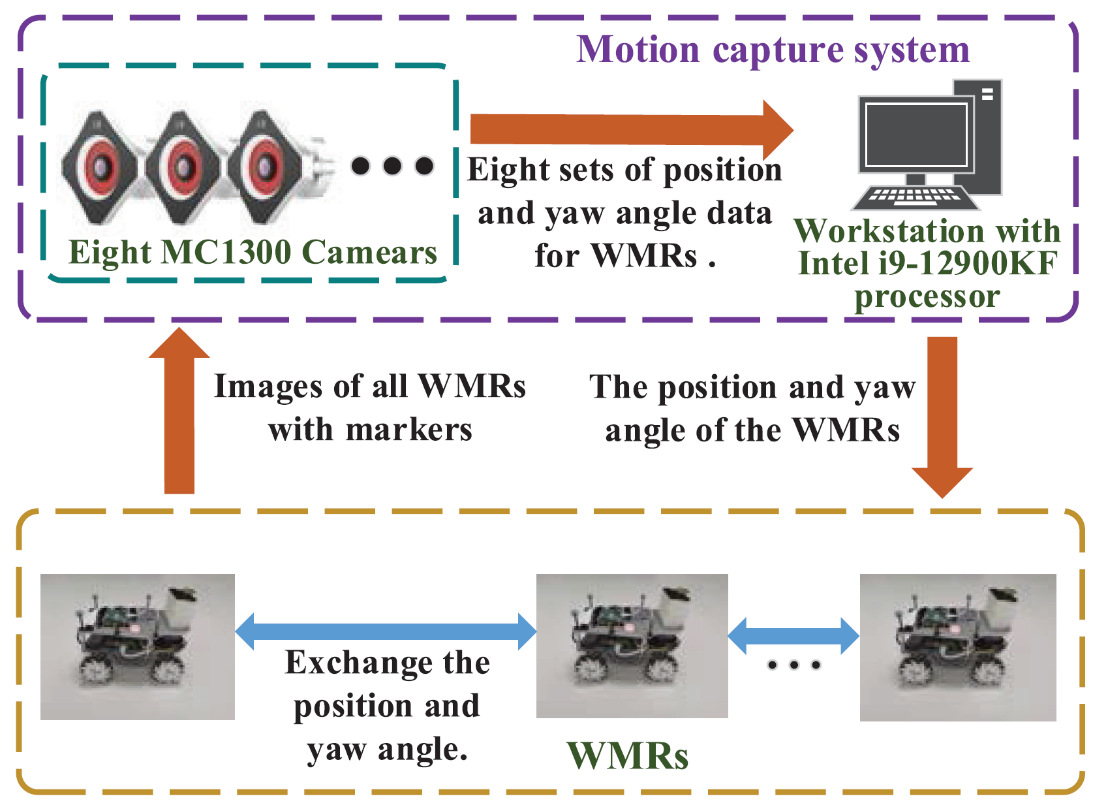
Figure 1: Schematic diagram of experimental equipment data flow
Leveraging the advantages of the CHINGMU visual MC1300 motion capture system, such as sub-millimeter level positioning and high-precision capture, the position, heading angle, travel trajectory, and other motion information of the WMRs were collected and located in real-time. This provided precise data reference for algorithm verification, ensuring the authenticity and validity of the experiments.
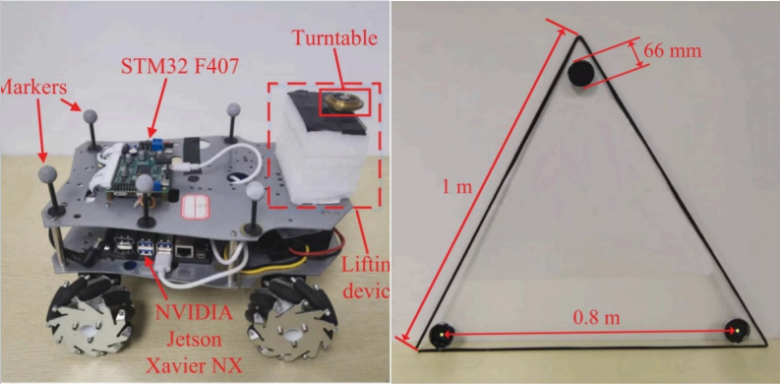
Figure 2: Diagram of WMR and transportation platform
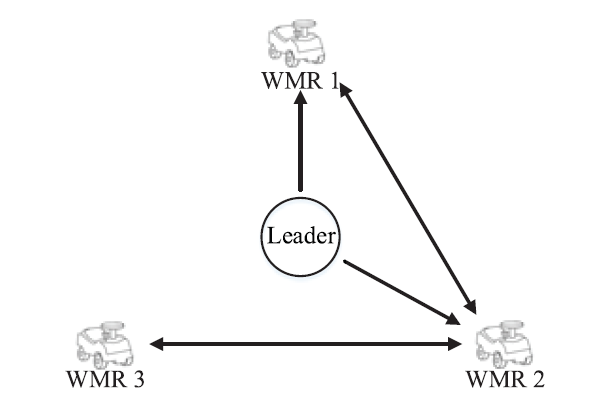
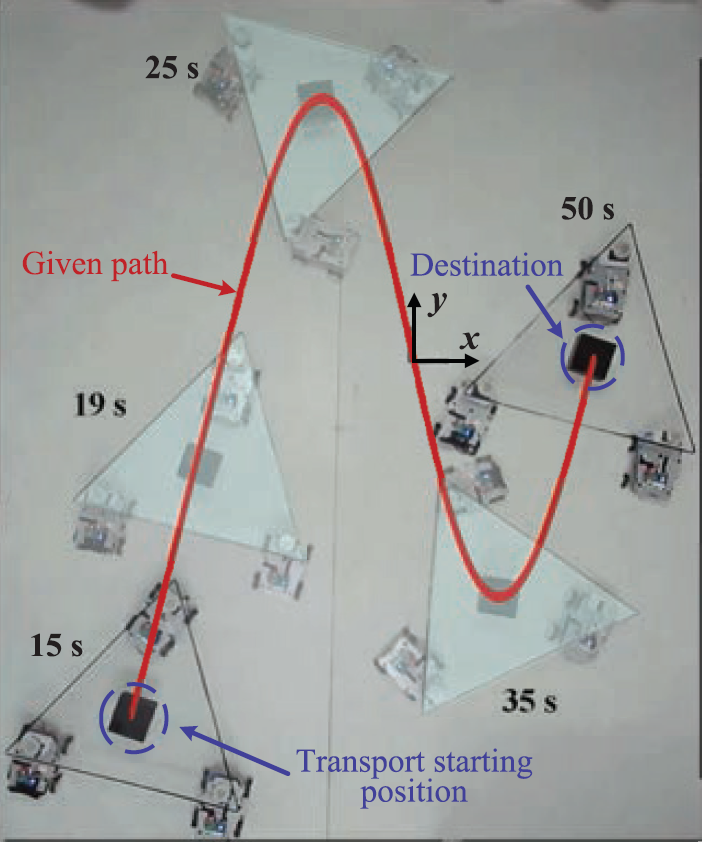
Figure 4: Process of the cooperative transportation experiment
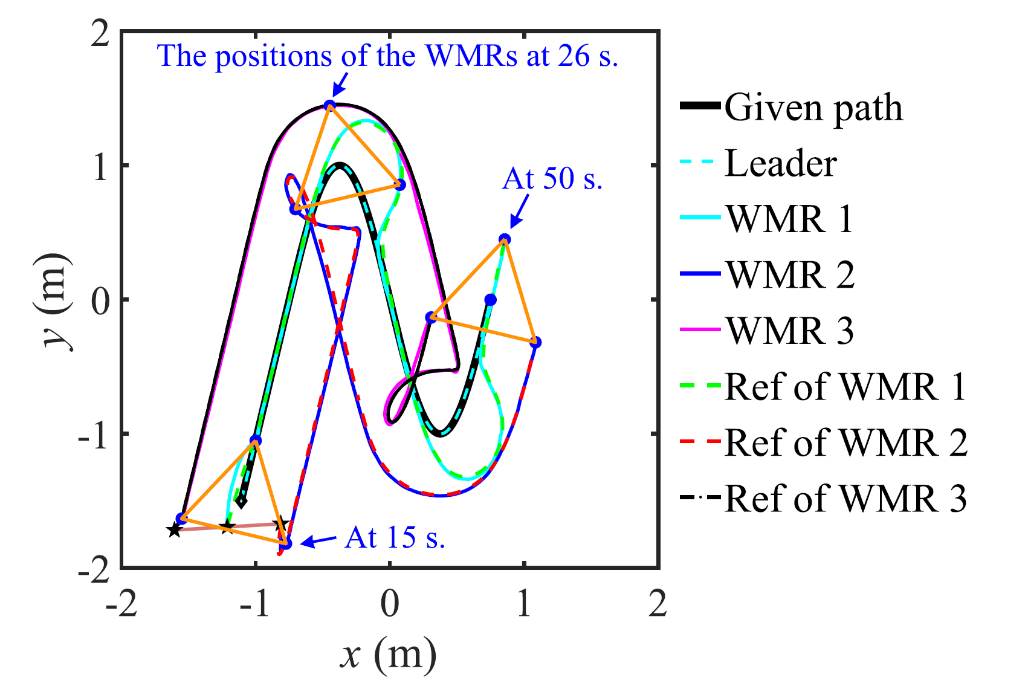
Figure 5: Trajectories of the virtual leader and the WMRs
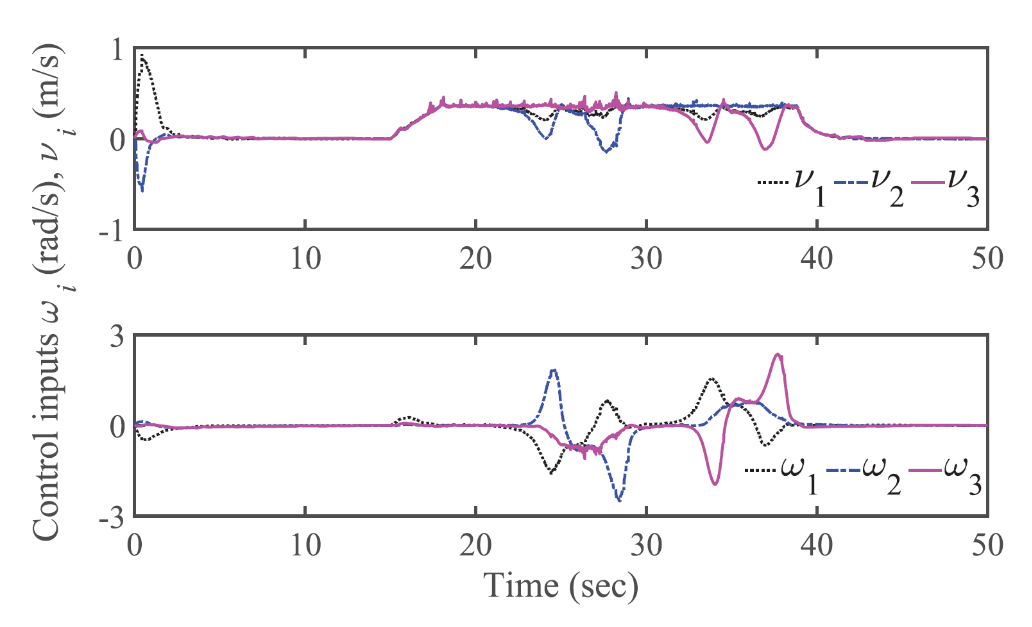
Figure 6: Control inputs of the WMRs

Figure 7: Velocity response curves of the WMRs
III. Experimental Results:
This paper studied the formation control problem of velocity-constrained WMRs and proposed a novel formation control strategy based on monotrajectory planning. Using this strategy, velocity-constrained WMRs can efficiently form the desired formation shape and maintain this shape while moving along a given path. The proposed strategy was also applied to a cooperative transportation task. Experiments verified the high efficiency and excellent performance of the proposed strategy.
References:
[1] J. Alonso-Mora, S. Baker, and D. Rus, “Multi-robot formation control and object transport in dynamic environments via constrained optimization,” Int. J. Robot. Res., vol. 36, no. 9, pp. 1000–1021, 2017.
[2] X. Wang, W. Liu, Q. Wu, and S. Li, “A modular optimal formation control scheme of multiagent systems with application to multiple mobile robots,” IEEE Trans. Ind. Electron., vol. 69, no. 9, pp. 9331–9341, 2022.
[3] Q. Wu, X. Wang, and X. Qiu, “Embedded technique-based formation control of multiple wheeled mobile robots with application to cooperative transportation,” Control Eng. Pract., vol. 150, 2024, Art. no. 106002.
[4] R. Adderson, B. Akbari, Y.-J. Pan, and H. Zhu, “Multileader and role-based time-varying formation using GP inference and sliding mode control,” IEEE/ASME Trans. Mechatronics, vol. 29, no. 6, pp. 4744–4754, 2024.
[5] A. J. H¨ausler, A. Saccon, A. P. Aguiar, J. Hauser, and A. M. Pascoal, “Energy-optimal motion planning for multiple robotic vehicles with collision avoidance,” IEEE Trans. Control Syst. Technol., vol. 24, no. 3, pp. 867–883, 2016.
[6] J. Li, M. Ran, and L. Xie, “Efficient trajectory planning for multiple non-holonomic mobile robots via prioritized trajectory optimization,” IEEE Robot. Autom. Lett., vol. 6, no. 2, pp. 405–412, 2021.
[7] R. Olfati-Saber and R. M. Murray, “Consensus problems in networks of agents with switching topology and time-delays,” IEEE Trans. Autom. Control, vol. 49, no. 9, pp. 1520–1533, 2004.
[8] W. Ren and E. Atkins, “Distributed multi-vehicle coordinated control via local information exchange,” Int. J. Robust Nonlinear Control, vol. 17, nos. 10–11, pp. 1002–1033, 2007.
[9] A. Morro, A. Sgorbissa, and R. Zaccaria, “Path following for unicycle robots with an arbitrary path curvature,” IEEE Trans. Robot., vol. 27, no. 5, pp. 1016–1023, 2011.
[10] X. Wang, G. Wang, and S. Li, “Distributed finite-time optimization for integrator chain multiagent systems with disturbances,” IEEE Trans. Autom. Control, vol. 65, no. 12, pp. 5296–5311, 2020.
[11] D. H. Hristu-Varsakelis and W. S. Levine, Handbook of Networked and Embedded Control Systems. Basel, Switzerland: Birkh¨auser Verlag, 2005.
[12] W. Dixon, D. Dawson, F. Zhang, and E. Zergeroglu, “Global exponential tracking control of a mobile robot system via a PE condition,” IEEE Trans. Syst., Man, Cybern., B (Cybern.), vol. 30, no. 1, pp. 129–142, 2000.