
 CN / EN
CN / EN
Southeast Univ Develops Enhanced MPC Using Residual Learning, Validated with CHINGMU Mocap

Model Predictive Control (MPC)
Model Predictive Control (MPC) has garnered widespread attention in robotics and automation systems (e.g., autonomous driving, industrial processes) due to its ability to systematically handle nonlinearity, constraints, and optimal performance. However, as a model-based control method, inaccuracies in the predictive model arising from model uncertainties and unknown external disturbances can significantly degrade its applicability in scenarios demanding high-end control performance. Existing research efforts focus on improving MPC performance under uncertainty, including robust control design methods considering worst-case scenarios and real-time disturbance compensation strategies based on Disturbance Observers (DOBs). Nonetheless, these methods either sacrifice nominal control performance or rely on prior selection of disturbance models, presenting limitations in practical applications. In recent years, with the continuous development of computing platforms, data-driven methods have gained significant traction in the control and robotics communities. However, purely data-driven approaches often exhibit poor generalizability and interpretability, and require large amounts of data for learning, greatly limiting their application in practical control system design.
To address these challenges, Professor Su Jinya and her team from the School of Automation at Southeast University, under the guidance of Professor Wen-Hua Chen from Loughborough University, UK, and in collaboration with Nanjing CYG Sunri Co., Ltd. (a leading enterprise in process industries), conducted research titled "Model Predictive Control Integrating Residual Learning and Real-Time Disturbance Rejection: Design and Experimentation". This work aims to leverage the advantage of low data dependency offered by Gaussian Process (GP) model residual learning strategies, combined with DOB-based real-time disturbance estimation and compensation, to provide new insights for enhancing MPC control performance under the influence of system unmodeled dynamics and unknown disturbances. The research findings have been published in the renowned Elsevier journal Control Engineering Practice.
I. Research Approach:
This study integrates a sparse GP for residual learning and a Generalized Extended State Observer (GESO) for real-time disturbance estimation into an MPC framework, forming a "GP-MPC-GESO controller". First, a robust differentiator is used to obtain velocity state estimates from position measurements without amplifying noise, which are then used to construct an input-state dictionary. Subsequently, residual learning based on available input-output measurements alleviates the burden on the GESO for real-time disturbance estimation, while the GESO estimates the remaining residual uncertainties after GP learning and external disturbances in real-time.
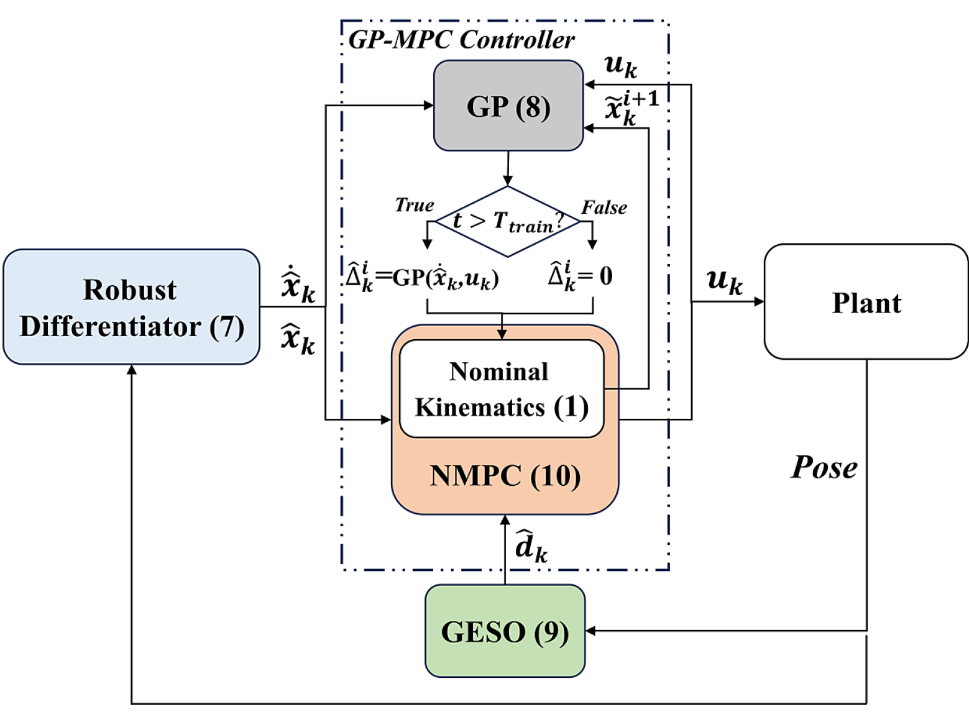
Figure 2: Control framework diagram of GP-MPC-GESO
- Sparse GP learns residual dynamics, enabling online learning of the residual dynamics model with a low-sample-size dictionary, enhancing predictive model accuracy and model interpretability.
- GESO estimates remaining uncertainties and external disturbances in real-time.
First implementation and validation of the algorithm on a physical experimental platform (Mecanum-wheel mobile robot) in both indoor and outdoor environments.
II. Experimental Validation:
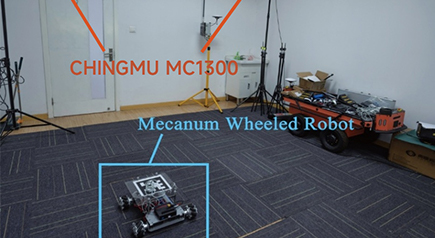
The experimental setup consists of a Mecanum-wheel vehicle, a motion capture system, etc. The CHINGMU visual optical motion capture system enables precise capture and representation of the system's physical motion, ensuring the reliability and validity of the experimental data. This system is built upon MC1300 cameras, CMTracker software, and the ROS vrpn package. As shown in Figure 3, high-speed cameras capture the time-varying position information of four fluorescent markers on the vehicle. The CMTracker software then acquires the position change data, which is subsequently broadcast to the onboard computing device of the experimental MWMR platform via the ROS vrpn package, realizing closed-loop controller design.
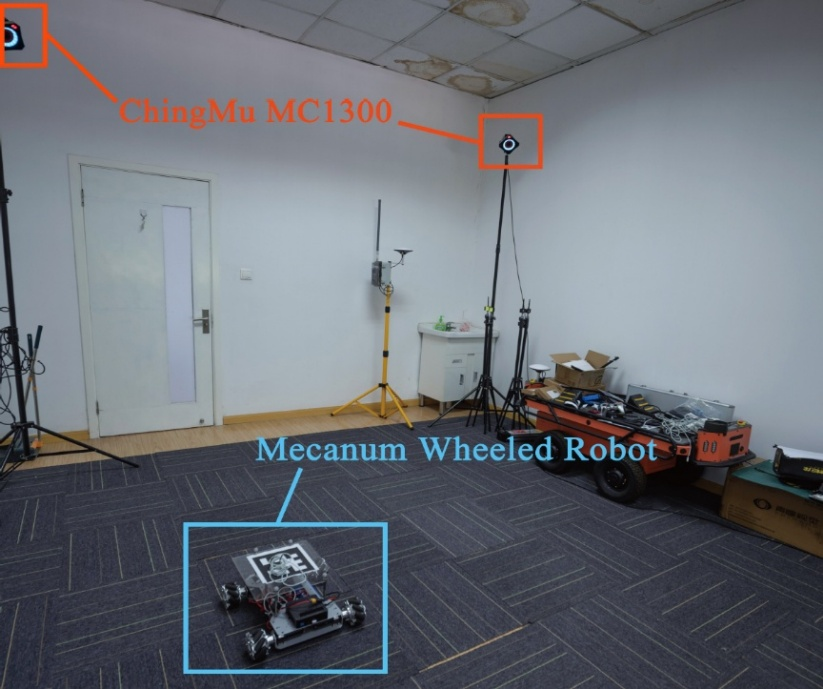
Figure 3: Schematic of the indoor experimental scene
The experiments comprehensively included simulation studies, indoor trajectory tracking experiments under different conditions, and an outdoor lemniscate trajectory tracking experiment. The position information for the outdoor experiment utilized a self-developed, open-source UAV-based localization algorithm. Figure 4 demonstrates the effectiveness of the sparse GP in learning the model residuals, showing its ability to effectively learn the system's unmodeled dynamics and output corresponding uncertainties with only 30 sample points. Figures 5 and 6 present indoor circular trajectory tracking experiments at two different reference speeds and a lemniscate trajectory tracking experiment. The experimental results indicate that the proposed GP-MPC-GESO framework's design of "residual learning + model prediction + disturbance compensation" can effectively enhance the nominal performance and robustness of traditional MPC under uncertainties and external disturbances.
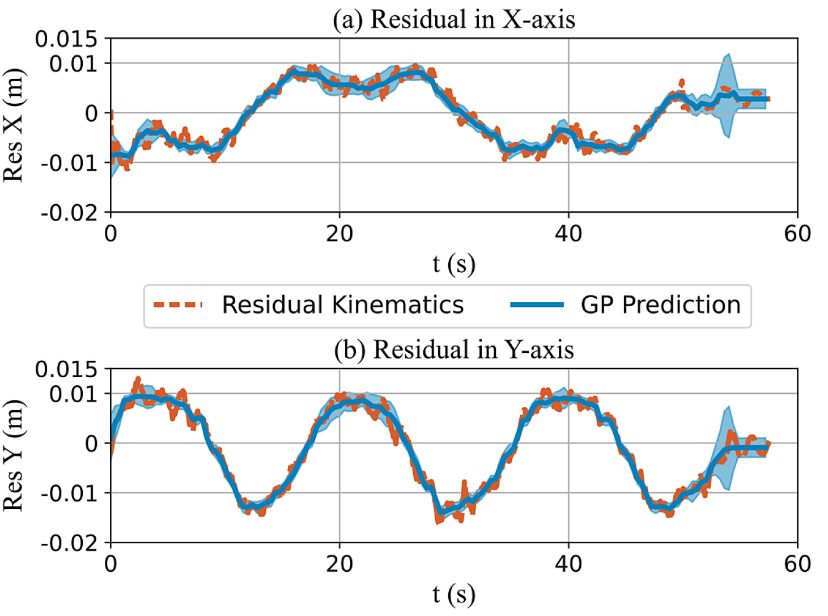
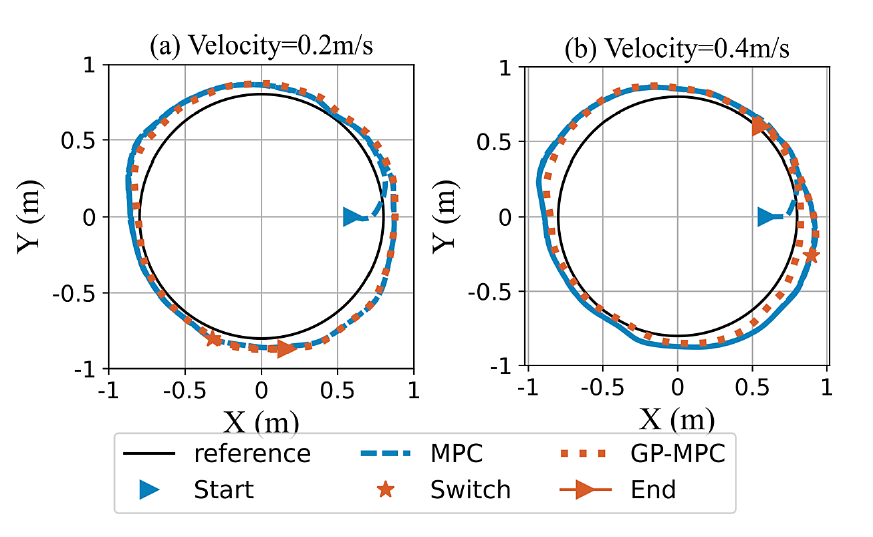
Figure 5: Indoor circular trajectory tracking experiment
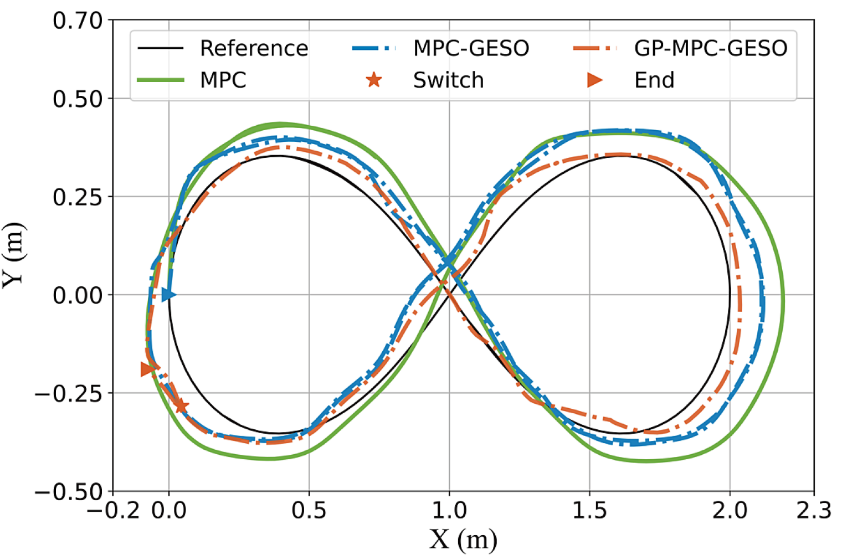
Figure 6: Indoor lemniscate trajectory tracking and collaborative transport experiment process
The outdoor physical experiment in Figure 7 further validates the robustness and effectiveness of the proposed method, laying the foundation for the practical application of this control framework.
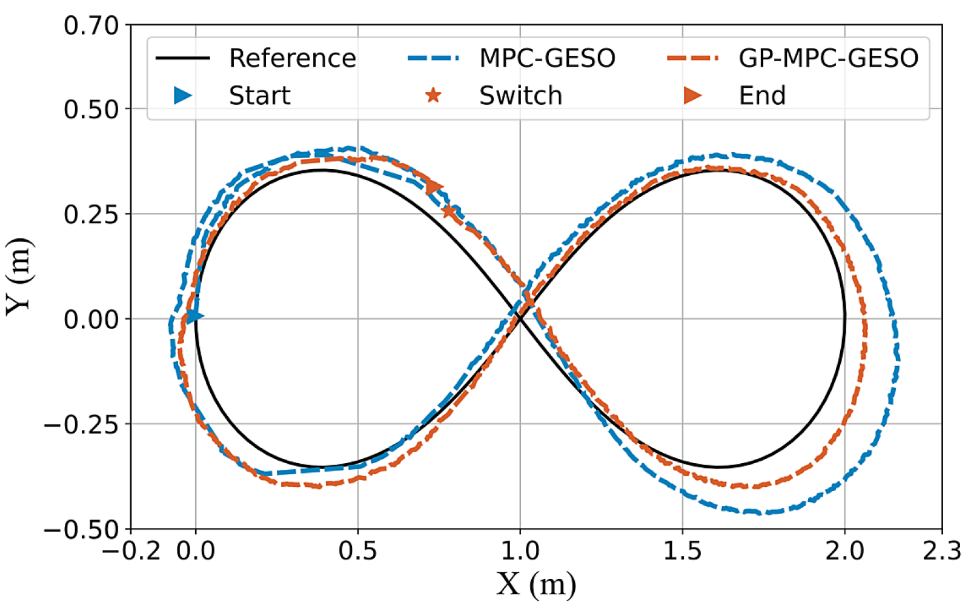
Figure 7: Outdoor lemniscate trajectory tracking experiment
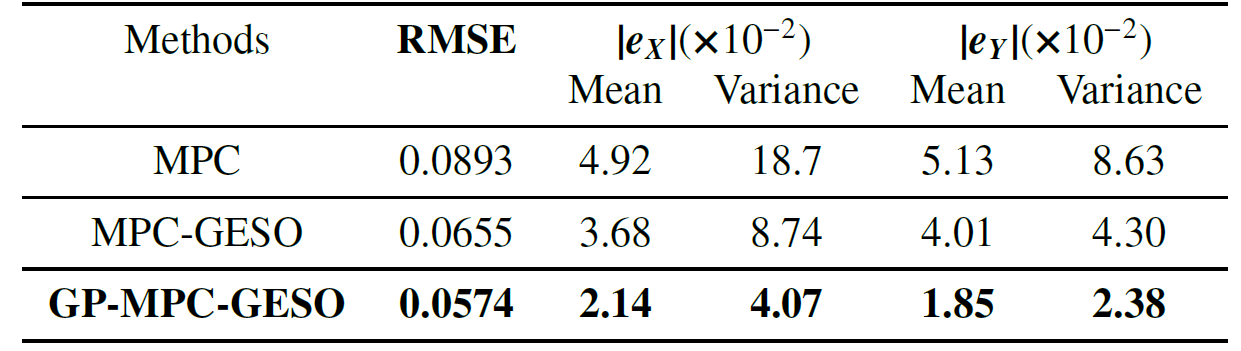
Figure 8: Results of the indoor lemniscate trajectory tracking experiment
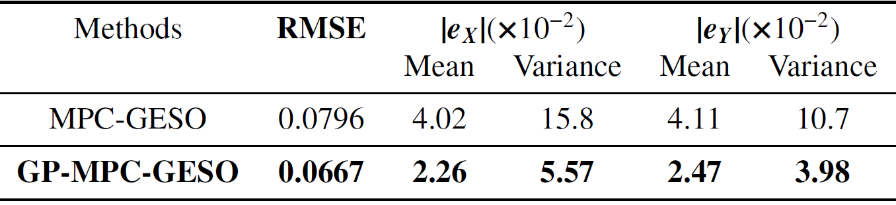
Figure 9: Results of the outdoor lemniscate trajectory tracking experiment
The results shown in the above figures indicate that comparative trajectory tracking control experiments conducted on the Mecanum-wheel mobile robot under various indoor and outdoor settings demonstrate that the proposed GP-MPC-GESO controller reduces the RMSE by 12.4% and 16.2% respectively in indoor and outdoor lemniscate tracking compared to the state-of-the-art MPC-GESO controller, fully validating the effectiveness and robustness of the proposed method.
III. Experimental Outcomes:
This research is the first to implement nonlinear MPC control combining GP residual learning and GESO disturbance estimation on a hardware platform, with the CHINGMU visual positioning system providing reliable and accurate real-world data support for the experiments. The experimental results show that this method offers significant advantages in improving trajectory tracking accuracy and reducing disturbance impact, providing a new approach for autonomous robot control.
References
[1] Kabzan, Juraj, Lukas Hewing, Alexander Liniger, and Melanie N. Zeilinger. "Learning-based model predictive control for autonomous racing." IEEE Robotics and Automation Letters 4, no. 4 (2019): 3363-3370.
[2] Chen, Wen-Hua, Jun Yang, Lei Guo, and Shihua Li. "Disturbance-observer-based control and related methods—An overview." IEEE Transactions on industrial electronics 63, no. 2 (2015): 1083-1095.
[3] Zhang, Haodi and Su, Jinya and Yang, Jun and Li, Shihua. DA-MPPI: Disturbance-Aware Model Predictive Path Integral via active disturbance estimation and compensation, 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), accepted.