Shanghai University
Recently, Dr. Rao Jinjun, an associate researcher from the School of Mechanical Engineering and Automation at Shanghai University, led his research team to investigate the theoretical and practical significance of multi-drone cooperative flight. Their findings were published in the prestigious journal "Knowledge-Based Systems" (SCI, Q1 Top, IF=8.8) under the title "Dual-Drone Cooperative Suspension Transportation Path Planning Based on Artificial Potential Field-A* Algorithm." Dr. Rao Jinjun serves as the first author, with Shanghai University listed as both the primary and corresponding institution.
In recent years, unmanned aerial vehicles (UAVs), especially quadrotors, have played an irreplaceable role as aerial robots. Their capability to navigate within confined spaces, coupled with low noise, zero emissions, and portability, makes them ideally suited for mid-to-short-range missions. Consequently, quadrotors are frequently tasked with carrying diverse payloads, extensively applied in fields such as aerial photography and mapping, agricultural plant protection, and power line inspection. However, limitations in size and endurance hinder the solo transportation capacity of a single quadrotor, limiting its practical applicability. Collaborative operations among multiple drones, through complementary capabilities and coordinated actions, can significantly enhance the overall system efficiency and significantly boost payload transportation capabilities.
The application of quadrotors in payload transportation tasks, particularly for small yet heavy loads, underscores the practical value of multi-drone cooperative transportation schemes. Researching cooperative transportation missions and conducting experimental tests on collaborative suspension payload transportation using drones can enhance the suspension capability of quadrotors, thereby contributing to the theoretical and practical advancement of multi-drone cooperative flight studies.
To achieve safe and efficient collaborative suspension transportation by quadrotors, this paper delves into the path planning strategy for a dual-quadrotor cooperative transportation system, proposing a novel Artificial Potential Field-A* (APF-A*) algorithm. This algorithm incorporates the concept of repulsive force to optimize the heuristic function, ensuring that the quadrotors maintain a safe distance from obstacles during flight. Based on the theory of artificial potential fields, a strategy for dual-drone cooperative transportation is defined. This approach not only enhances search efficiency while seeking the optimal path but also effectively mitigates payload swing motions, guaranteeing the safety of load transportation.
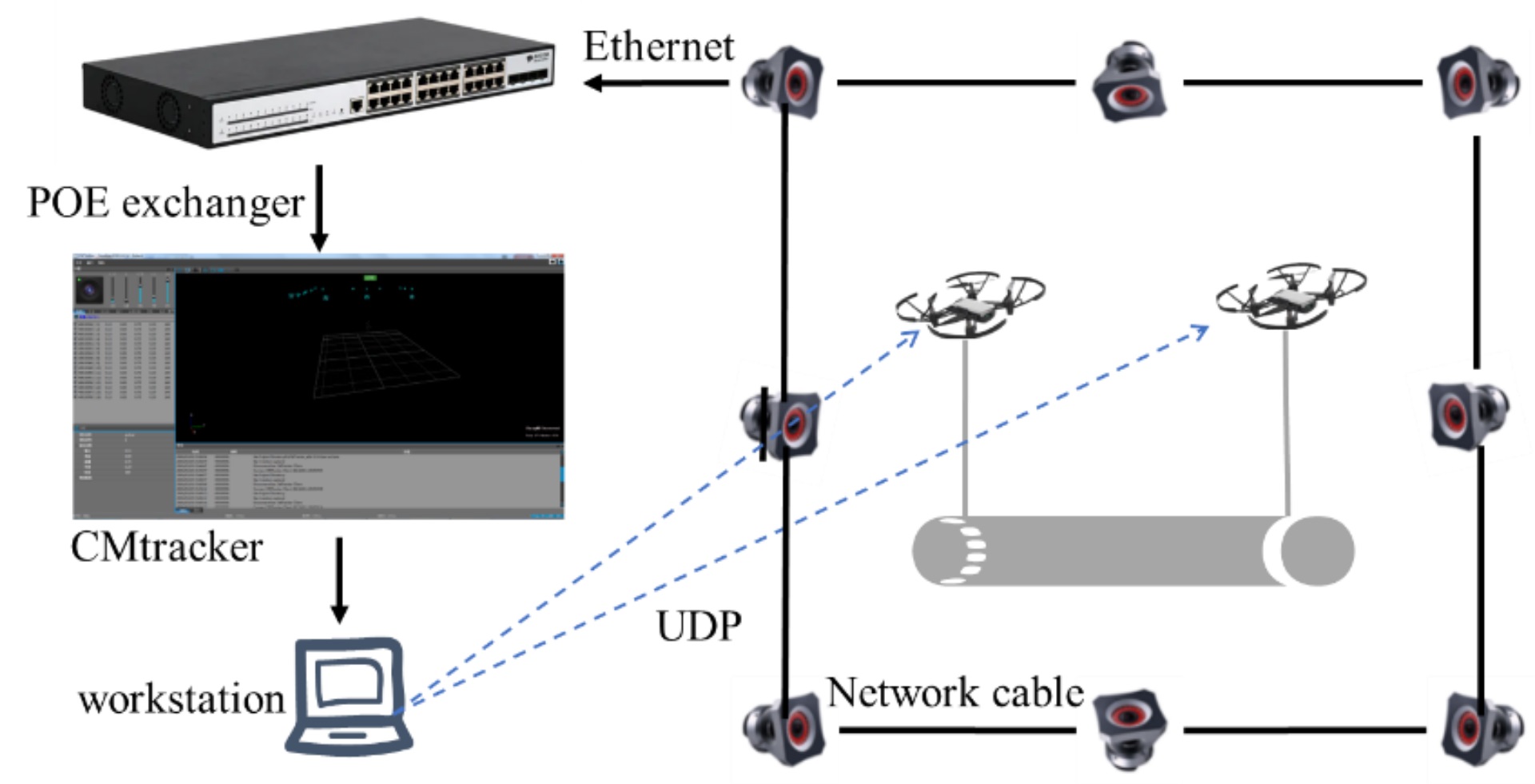
Experimental Platform Structure Diagram
Using Airsim virtual scenarios and real-world field tests, joint simulations and experiments were conducted on the cooperative flight control and path planning of quadrotors. Notably, the experimental platform leveraged a high-precision infrared optical motion capture system provided by Shanghai ChingMu Vision Technology Co., Ltd.
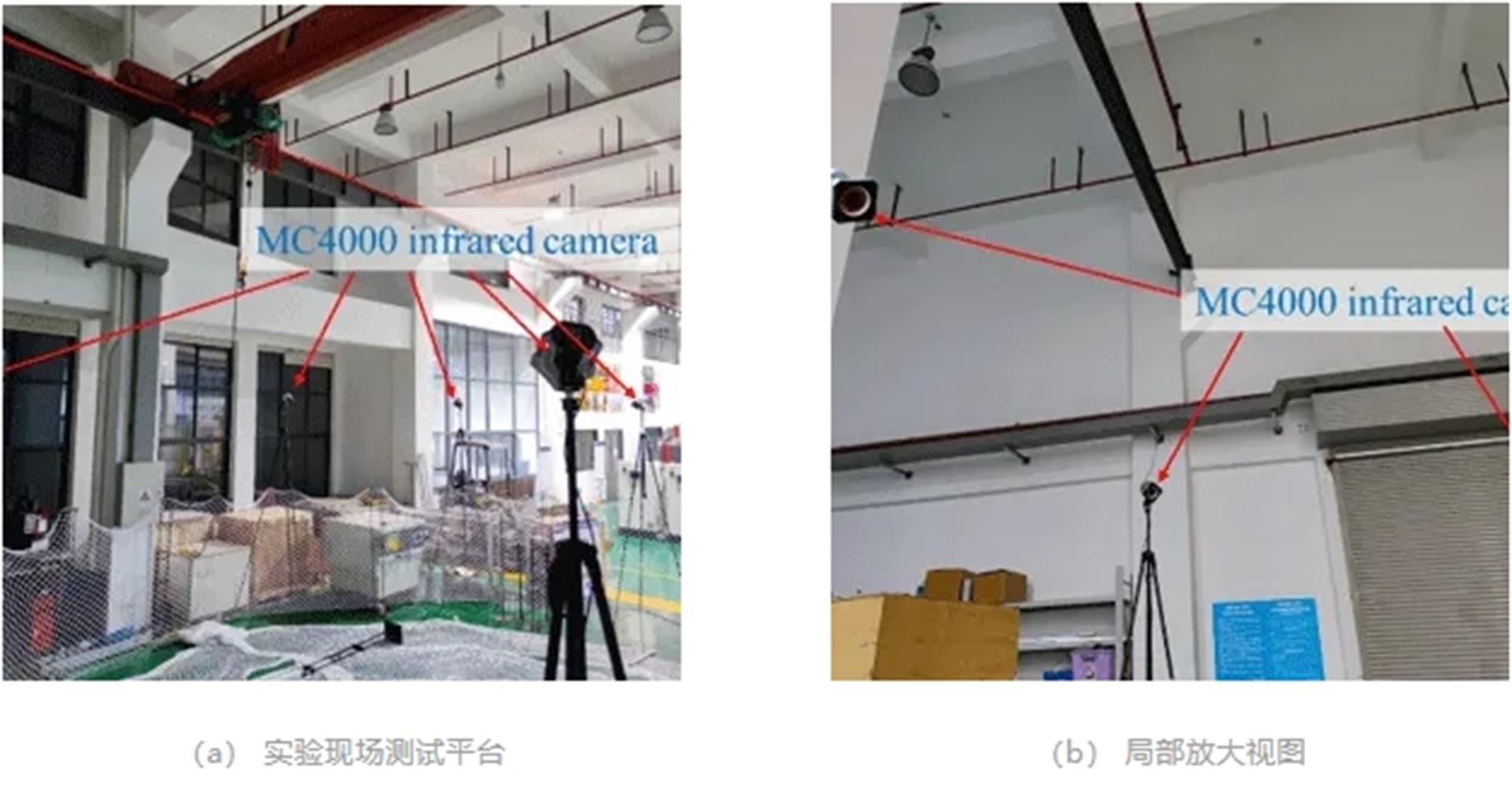
Motion Capture System Experimental Platform
The results demonstrate that the proposed algorithm provides a safe and reliable navigation trajectory for the dual-drone cooperative transportation system, enabling the wingman drone to alter its formation near obstacles to ensure the safe transportation of the payload. Compared to the conventional A* algorithm, the introduction of the repulsive force concept in the APF-A* algorithm significantly outperforms in path planning, reducing search time by nearly 60% and the number of search grids by 53.75%. Additionally, the number of dangerous nodes is markedly decreased, leading to a substantial improvement in search efficiency and providing reliable navigation trajectories.

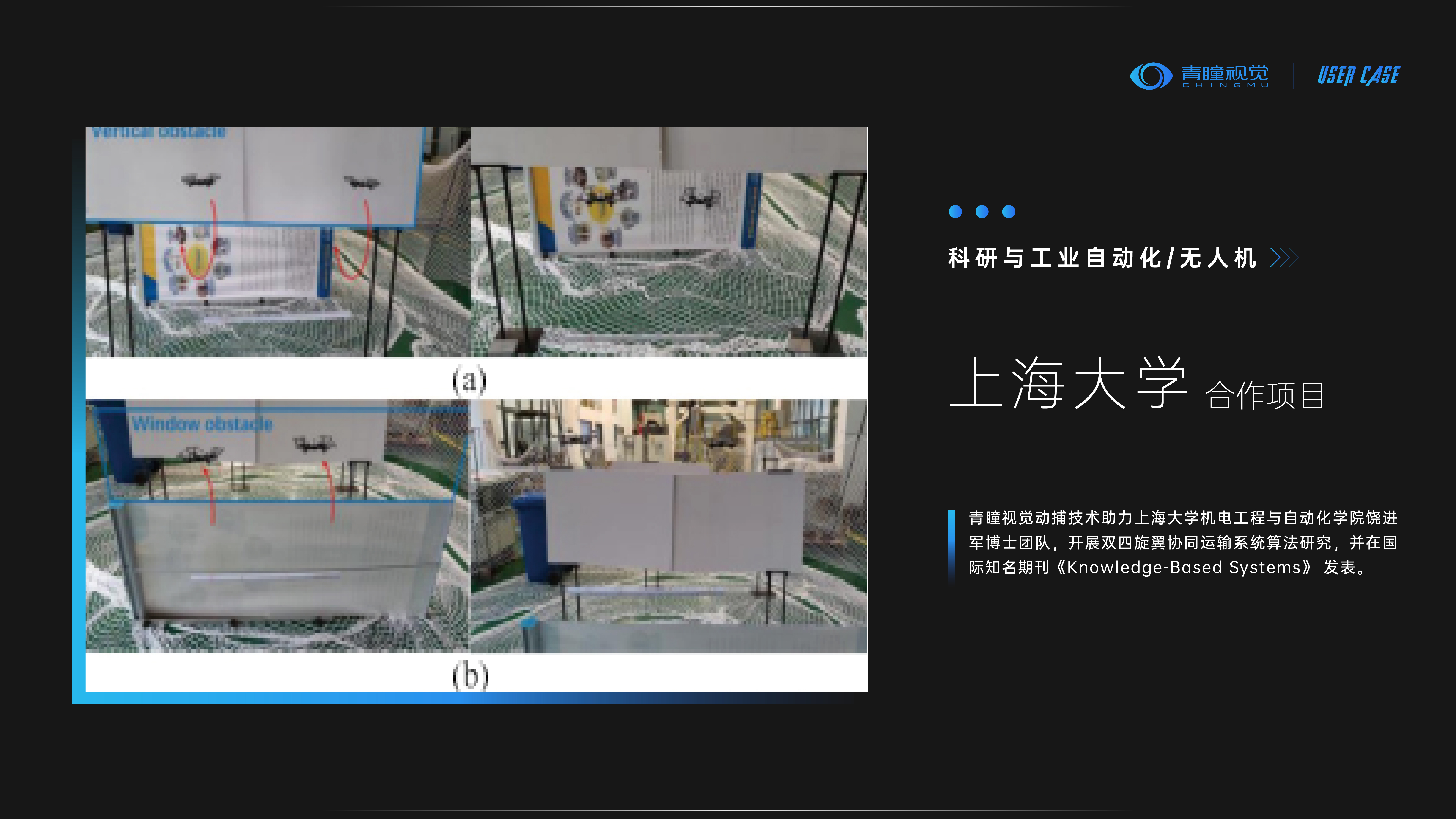
APF-A* Algorithm Demonstration for Dual-Quadrotor Cooperative Path Planning
The combined simulation and experimental results confirm that the multi-rotors maintain a safe distance from obstacles and traverse a secure flight corridor during payload transportation, eliminating the risk of collisions.
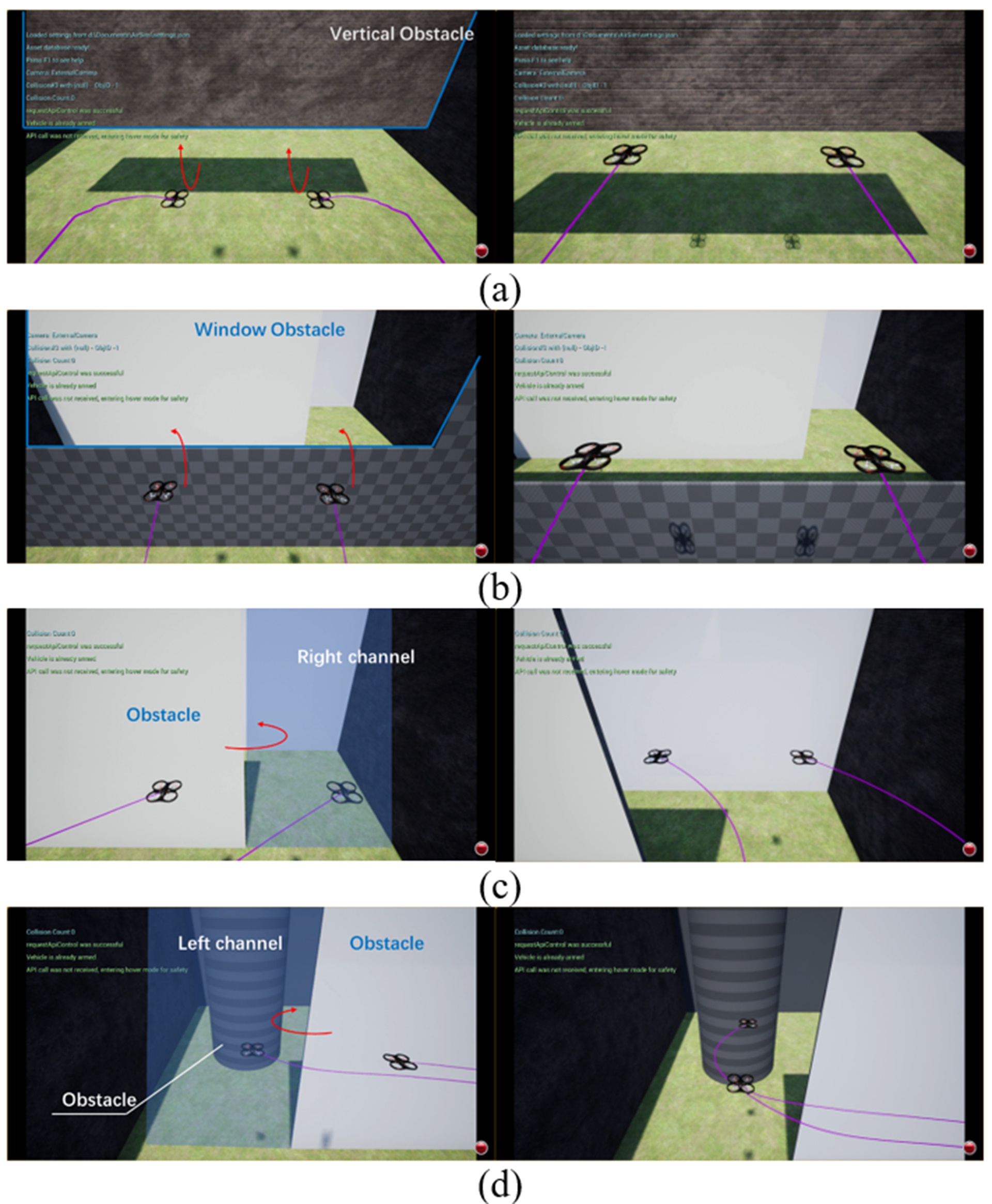
Obstacle Avoidance Illustrations in Simulation and Real Scenarios
The algorithm ensures that the wingman drone adjusts its formation upon obstacle detection, achieving obstacle avoidance and securing the successful completion of payload transportation tasks. This enhances the safety of the quadrotor suspension transportation system. Given the numerous uncertainties in real-world environments, future research will incorporate additional disturbance factors such as wind speed, air currents, and dynamic obstacles into simulations to improve the algorithm's applicability and broaden the scenarios for quadrotor payload transportation.
Original link:
https://doi.org/10.1016/j.knosys.2023.110797