
 CN / EN
CN / EN
University of Shanghai for Science and Technology
Client: Shanghai University of Science and Technology, Institute of Machine Intelligence
Paper:Controllers for Multiagent Systems With Input Amplitude and Rate Constraints and Their Application to Quadrotor Rendezvous
Applications: Motion Capture, Positioning and Measurement, Distributed Control Algorithms, UAV Collaborative Control, Autonomous Obstacle Avoidance and Navigation
Distributed rendezvous control of Unmanned Aerial Vehicles (UAVs) addresses many practical application challenges and promotes the advancement of related scientific and technological fields. It holds significant importance and value in military, civil, and scientific research fields. However, the control input of UAVs is often constrained by amplitude and rate, such as actuator saturation and environmental requirements, which poses a major challenge to traditional UAV rendezvous algorithms.
Recently, a team from the Institute of Machine Intelligence at the University of Shanghai for Science and Technology has made important progress in distributed consensus control for multi-agent systems with input amplitude and rate constraints, especially in the field of UAV rendezvous control. The relevant research results have been published in the IEEE Transactions on Automation Science and Engineering.
1. Main Result
The research team proposed distributed control algorithms that integrate a velocity damping term with nonlinear saturated functions for both undirected and directed graphs. They demonstrated that all agents can achieve consensus without violating predefined input amplitude and rate constraints through the developed control algorithms. In addition, they also solved the rendezvous control problem of quadrotor UAVs with motion constraints using the developed framework.
2. Main Contributions
(i) Unlike canonical consensus algorithms that neglect actuator saturation, which can result in large control efforts for each agent, our developed algorithms can guarantee upper bounds on the amplitude and rate of the input. These improvements have crucial implications for practical implementation.
(ii) The proposed approach can handle more general double-integrator dynamics with input constraints, thus solving the challenging rendezvous control problem for quadrotor UAVs with motion limits. In addition, the dependence of the control parameters on the agent in-degree is eliminated.
(iii) Unlike the saturated consensus methods for double-integrator systems that require strongly connected graphs, the approach only requires that the graph includes a spanning tree. They provided and experimentally validated a nontrivial extension to quadrotor UAV rendezvous control with motion limits on an indoor quadrotor platform.
3. Experimental Validation
An indoor experimental testbed was built, as shown in Figure 1. This testbed consists of the following essential components: (i) four Crazyflie 2.1 quadrotors with a USB radio dongle; (ii) a Ching Mu motion capture positioning system, which includes 12 cameras and a computer; and (iii) a ground station running on a Linux system. The positioning system was employed to detect four reflective markers attached to each quadrotor, thereby measuring its real-time position. These position data were relayed to the ground station through the router. Subsequently, the ground station ran the control programs for these quadrotors.
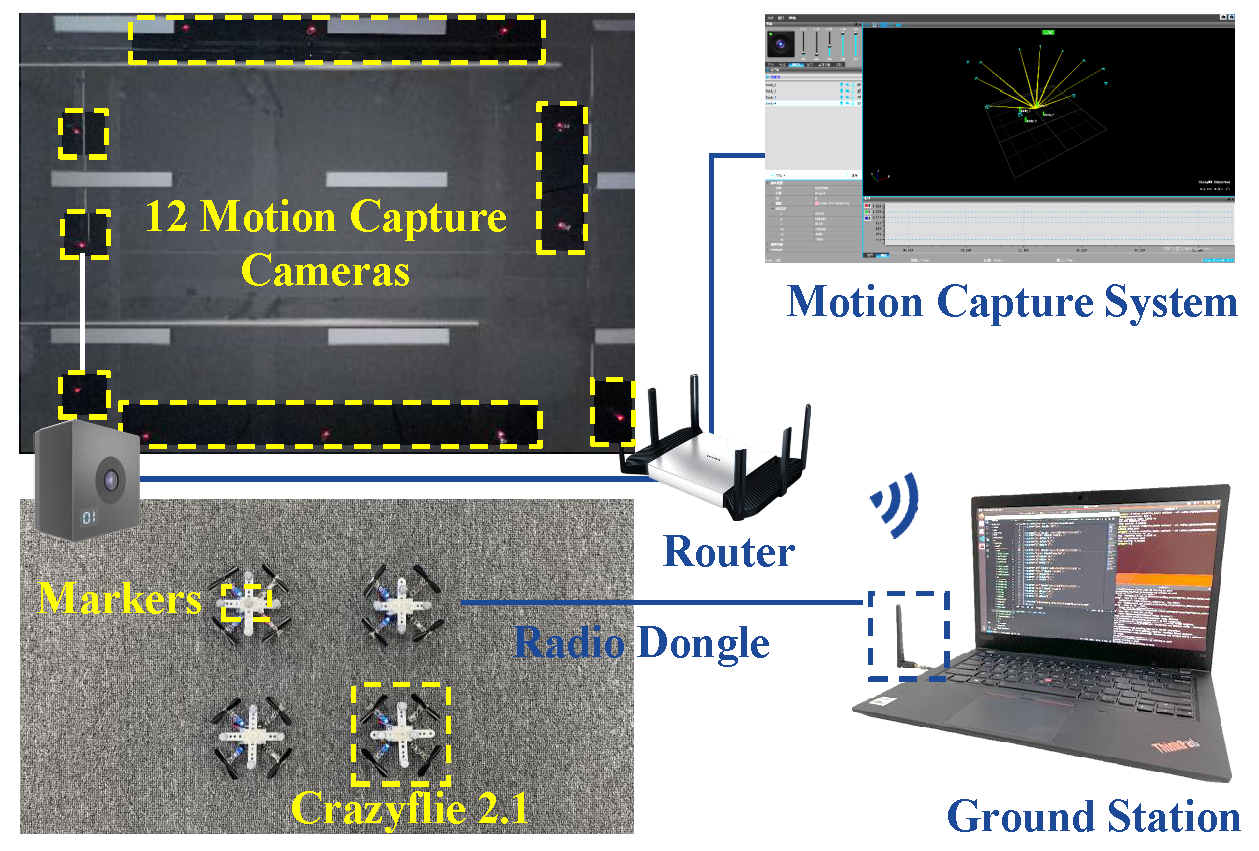
Figure 1. Experimental testbed.
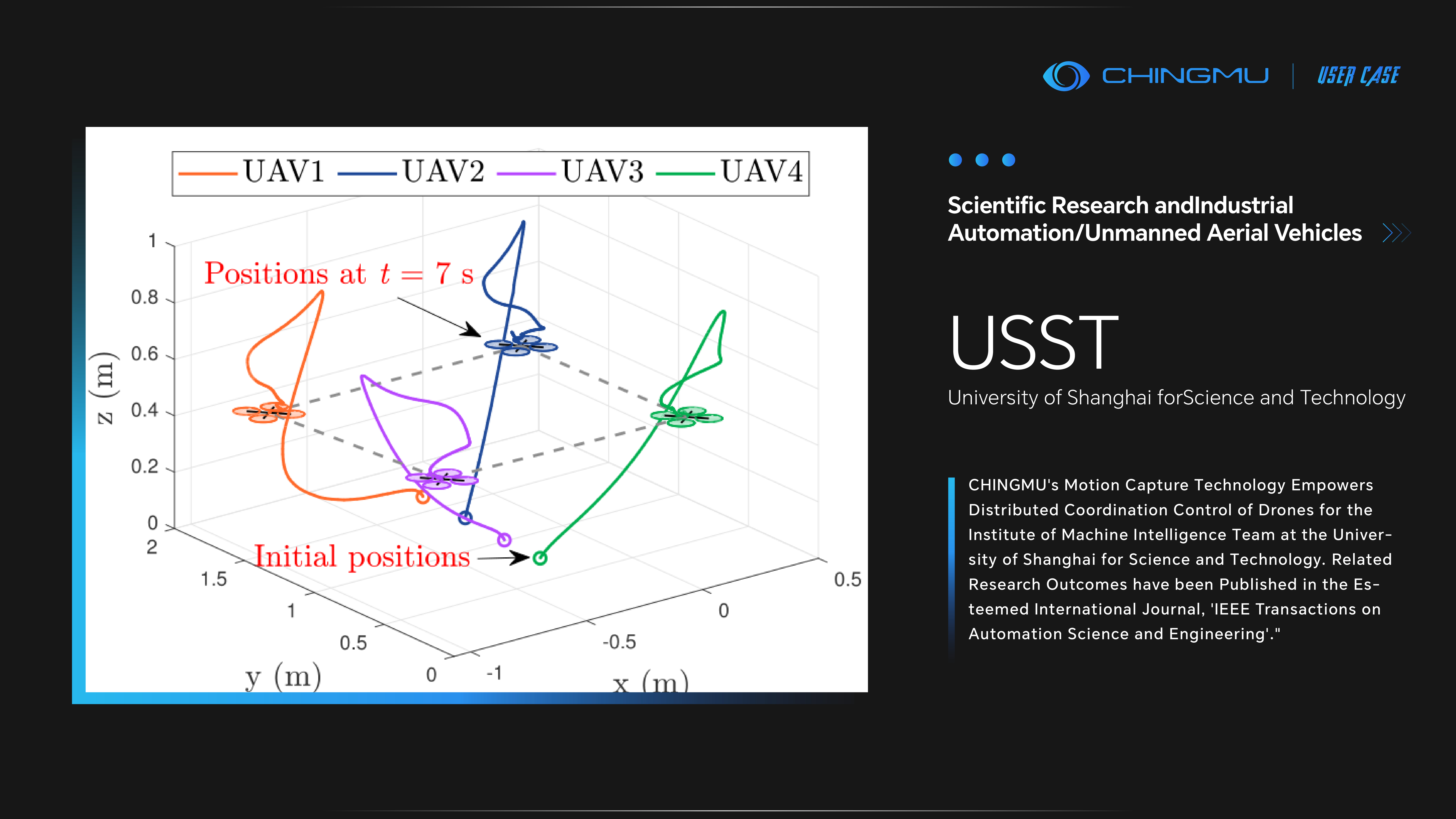
Figure 2 shows that the UAVs can achieve rendezvous within 7 seconds. The evolution of the amplitude and rate of the control signals along with their corresponding constraints are visualized in Figure 3 and Figure 4. The comparative experiment result in Figure 5 shows that the proposed approach results in smoother trajectories and less overshoot.
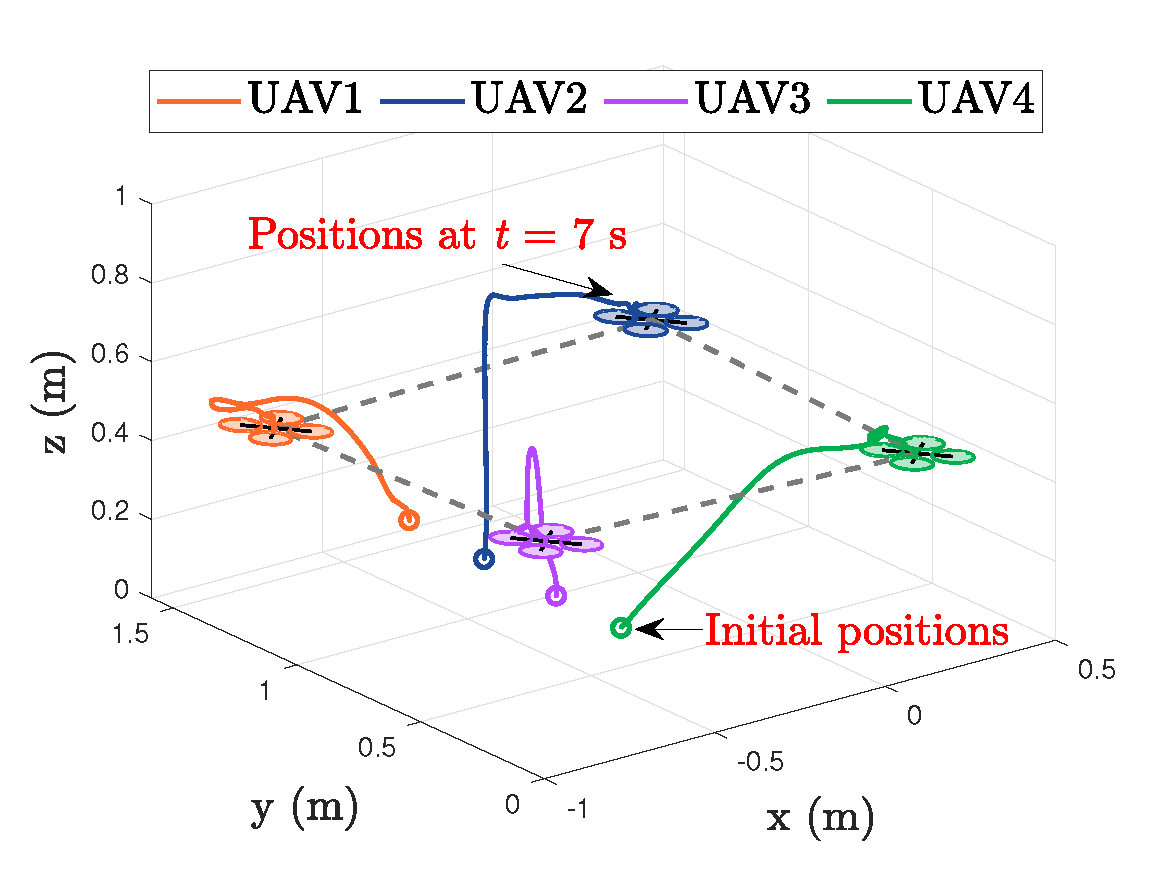
Figure 2. 3D trajectories of four quadrotor UAVs using the proposed control algorithm.
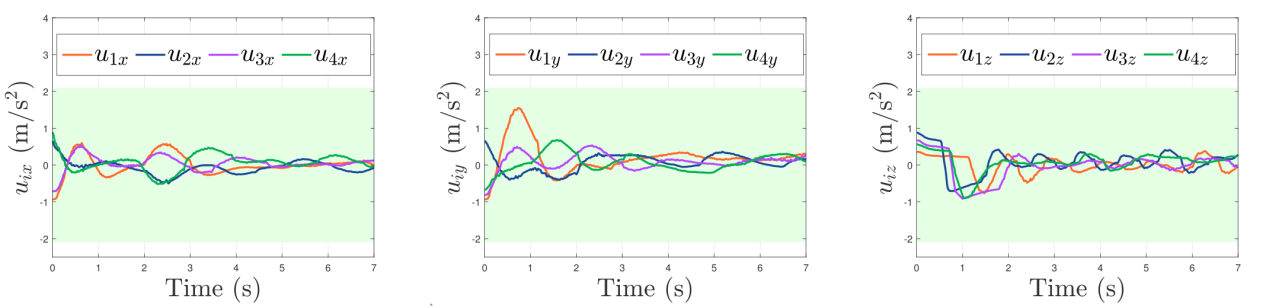
Figure 3. Amplitude profiles of the control signal using the proposed control algorithm. The green blocks indicate amplitude constraints.
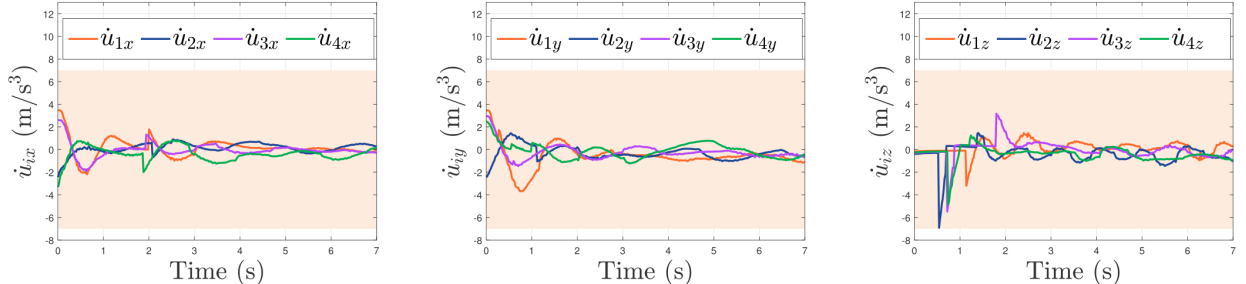
Figure 4. Rate profiles of the control signal using the proposed control algorithm. The peach-colored blocks indicate rate constraints.
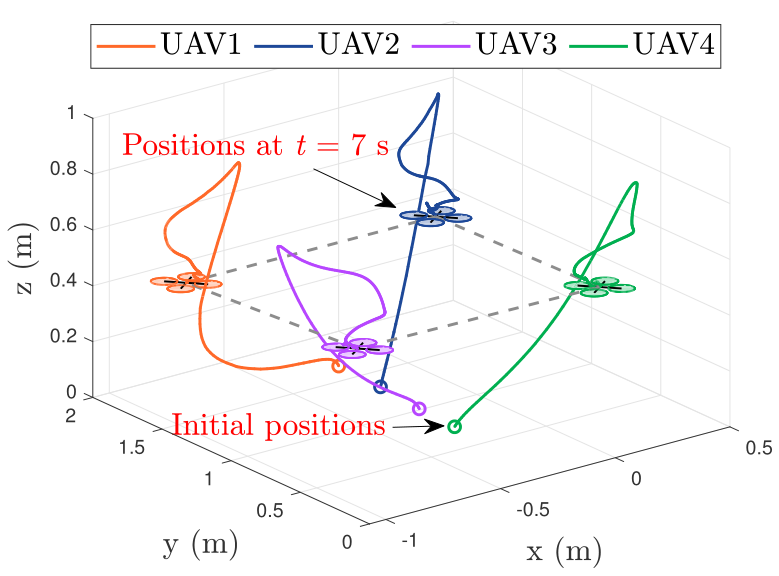
Figure 5. Comparative experiment: 3D trajectories of four quadrotor UAVs using the canonical consensus algorithm.
4. Results and Discussion
The experimental results showed that the UAVs can quickly achieve distributed rendezvous. Using the proposed algorithm, the UAV trajectories were smoother and had smaller overshoots. In comparison, using canonical consensus algorithms that did not account for input constraints led to larger overshoots and oscillations in the UAV trajectories. To further demonstrate the robustness of the proposed controller, one of the quadrotors was moved after achieving rendezvous. Despite this disruption, a satisfactory rendezvous with a different rendezvous center was quickly reestablished after a brief adjustment period.
Under actuator saturation and external environmental constraints, the control inputs of agents are inevitably limited. These constraints lead to the degradation of the control performance of traditional algorithms, and even lead to instability of the closed-loop system in severe cases. The proposed method ensures that agent consensus control is achieved without violating predefined input amplitude and rate constraints. The experiments on UAV distributed consensus control demonstrated that the proposed algorithm has practical application value and achieved satisfactory control performance.
Link: https://ieeexplore.ieee.org/abstract/document/10639419

- Prev:No Prev
- Back
- Next:Shanghai University