
 CN / EN
CN / EN
Zhejiang Ocean University
Wave energy, as a highly potential renewable and clean energy source in the ocean, boasts an energy density five times that of wind energy and twenty times that of solar energy. It also enjoys a higher annual electricity generation time compared to these two energy forms, coupled with an abundant reserve reaching up to 7 billion kilowatts. However, the challenge for researchers has always been to efficiently and stably capture wave energy and convert it into electricity. Currently, both domestic and international experts, including scholars from prestigious institutions like Tsinghua University, have conducted extensive research and developed various types of wave energy converters (WECs), among which raft-type WECs are considered one of the most promising devices.
Yet, in practical applications, the performance and numerical simulation methods of two-body floating WECs equipped with mooring systems still require further development. Addressing this issue, the research team led by Professor Xu Peng and graduate student Chen Xuanyu from the School of Shipbuilding and Ocean Transportation, Zhejiang Ocean University, conducted a study on the performance of a two-raft WEC with a mooring system, providing novel insights and data support for the exploitation and utilization of wave energy. Their findings have been published in the internationally renowned journal JMSE.
I. Research Approach
The research team conducted an in-depth analysis of the dynamic characteristics of the two-raft WEC based on the three-dimensional potential flow theory. The device comprises two rectangular floats hinged together and a power take-off (PTO) system at the hinge point. By simplifying the equivalent PTO damping as a linear damping, the study investigated the impact of hinge position and float spacing on the wave energy capture factor in the frequency domain. The accuracy of the simulation results was verified through WEC model experiments, and the mooring system of the raft-type WEC was analyzed in the time domain, comparing the performance differences of wave energy converters with different mooring systems.
II. Experimental Validation
The experimental validation encompassed two parts: experimental testing and numerical simulation.
(A) Experimental Testing
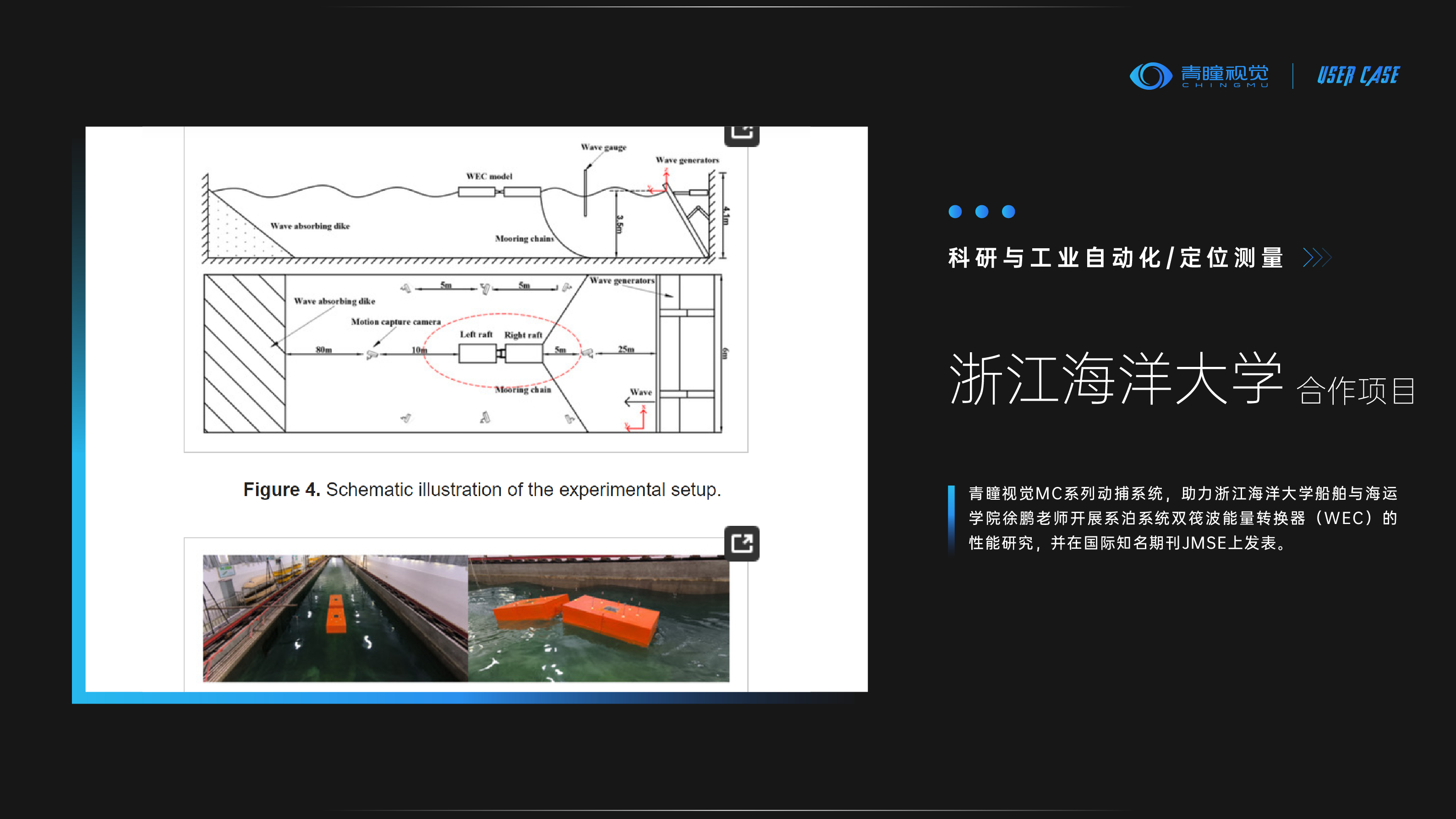
The experiment was conducted in a 130m-long, 6m-wide, and 4.1m-deep towing tank, utilizing a towing tank, optical motion capture system, experimental wave generator, wave height meter, and chains with axial bearing capacity. By measuring the changes in the six-degree-of-freedom motion amplitudes of the floats under different wave frequencies and heights, as well as the influence of the wavelength-to-characteristic length ratio on the motion response of the floats, the relationship between the motion response of the two-body float structure and different wave conditions was studied. To accurately monitor the float's trajectory, the experiment employed the ChingMu Vision MC series motion capture system, known for its stability, high precision, and outdoor enhancement capabilities, providing robust support for various experimental tests and verifications.

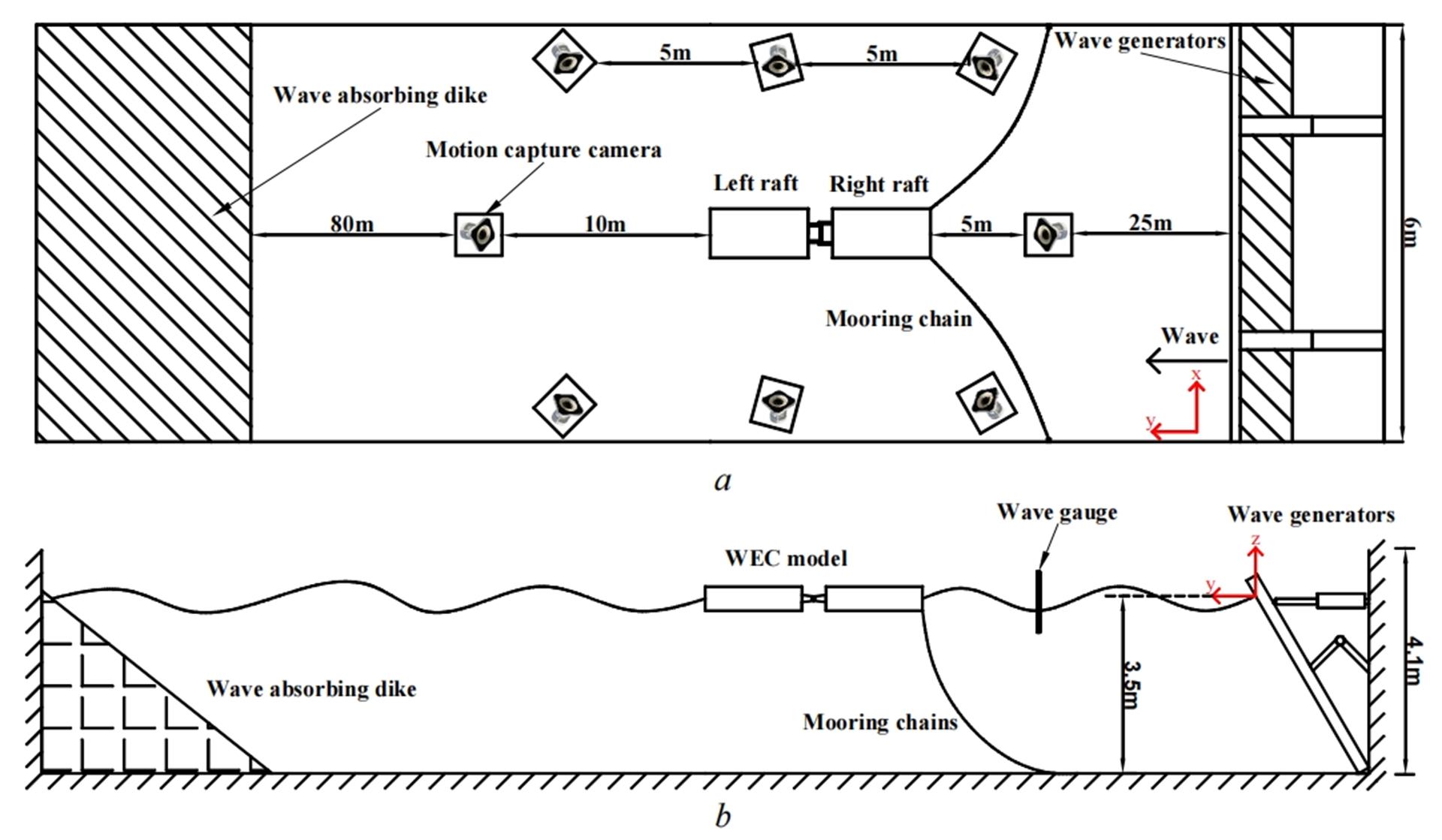
Figure 1 Mooring Scheme and Camera Layout: (a) Front View; (b) Top View
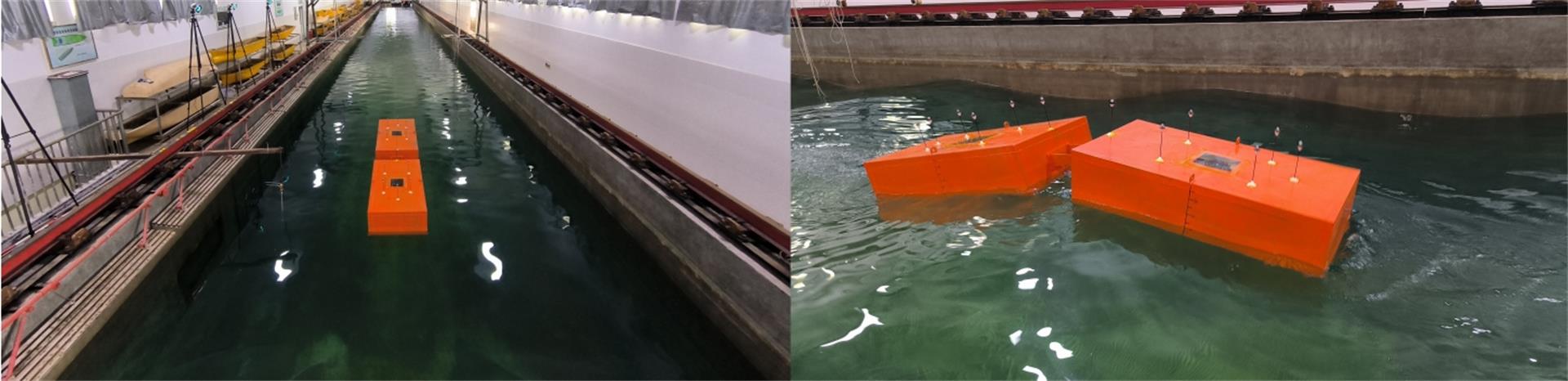
Figure 2 Layout of the Raft-Type Floating Body Model in the Towing Tank
Validation Results: The float's motion response varied under the same wave height but different wave periods. Similarly, notable differences were observed in the float's motion response under different wave heights, with steeper waves eliciting more pronounced responses than gentler ones. Variations in wave periods also significantly impacted the float's motion.
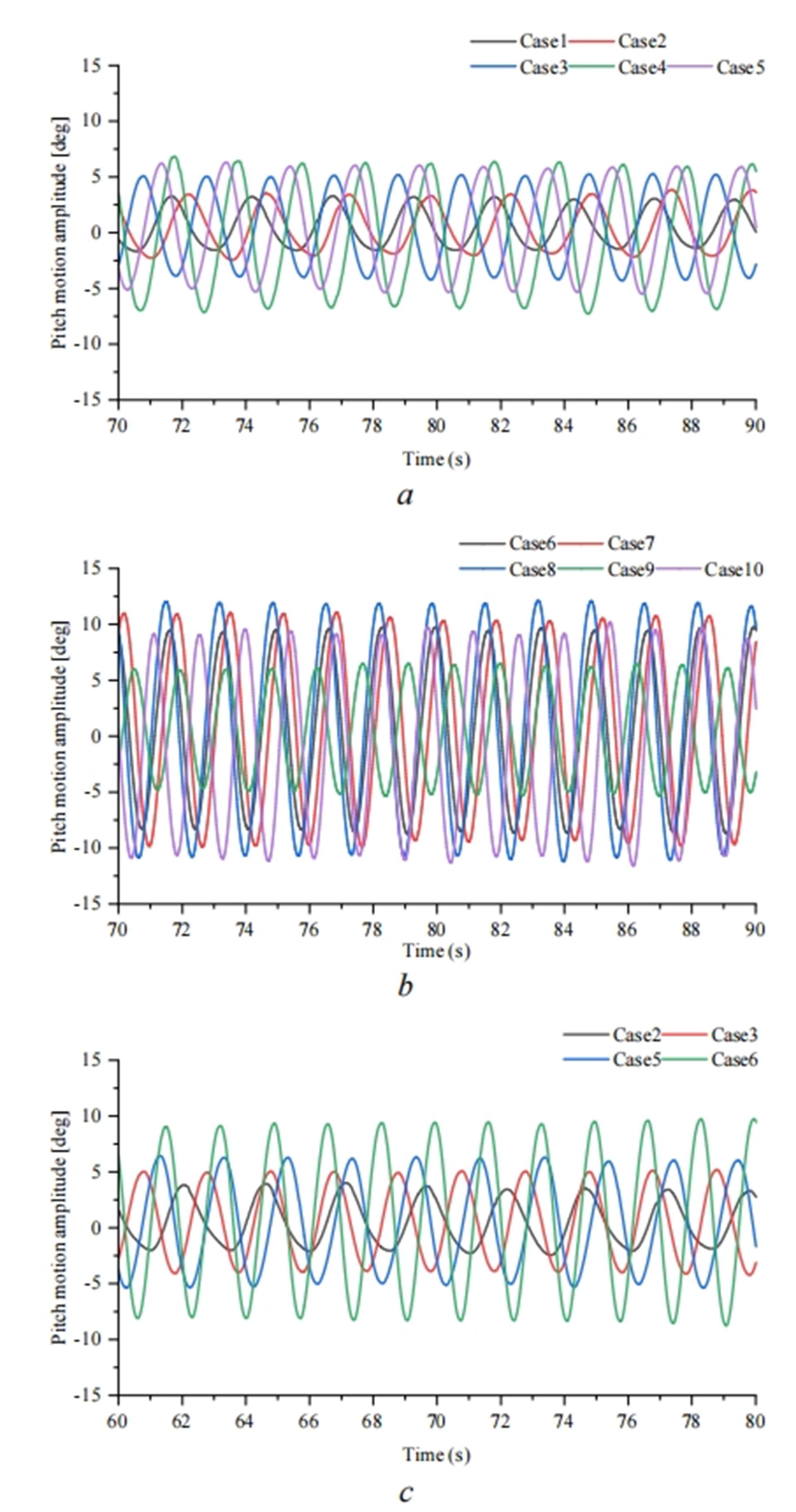
(a) Comparison of Experimental Pitch Motion Amplitudes for Case 1 to Case 5
(b) Comparison of Experimental Pitch Motion Amplitudes for Case 6 to Case 10
(c) Comparison of Experimental Pitch Motion Amplitudes between the Two Groups under the Same Period Variation
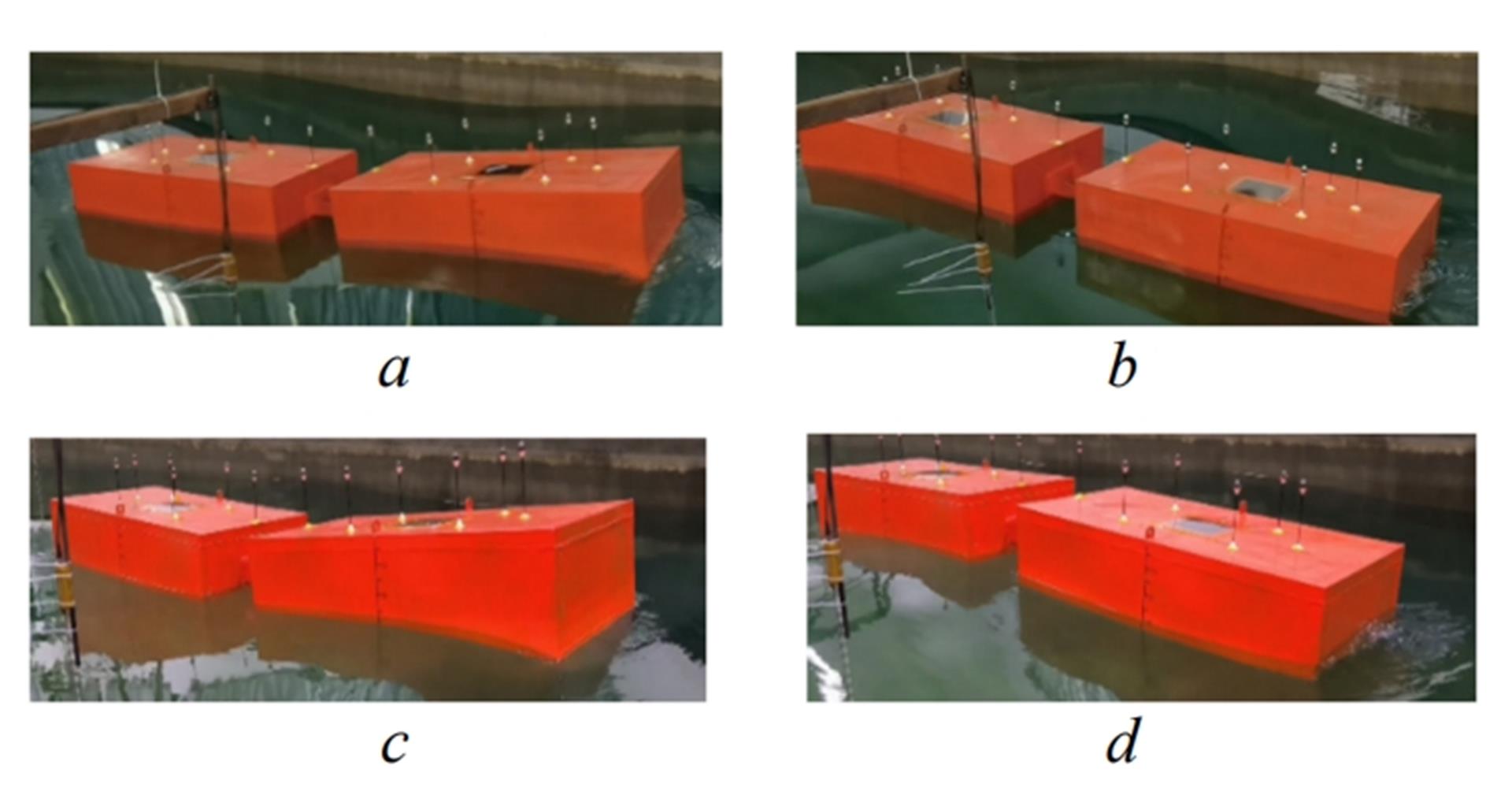
Snapshots of Floating Body Motion (T=2.00s):
(a) Snapshot of the floating body rising with waves under slow wave conditions (H=0.185m);
(b) Snapshot of the floating body descending with waves under slow wave conditions (H=0.185m);
(c) Snapshot of the floating body rising with waves under steep wave conditions (H=0.234m);
(d) Snapshot of the floating body descending with waves under steep wave conditions (H=0.234m).
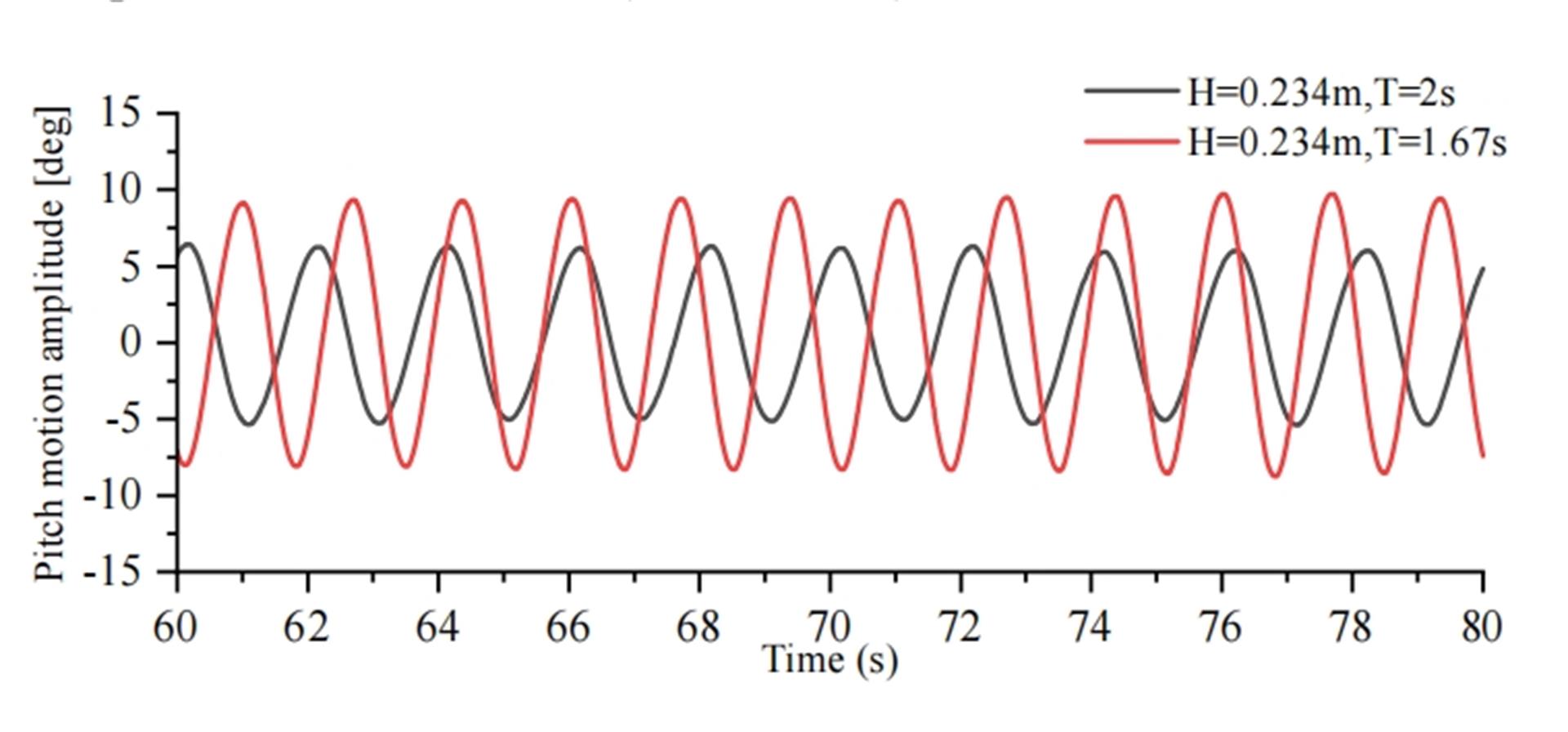
Comparison of Relative Pitch Motion Amplitude Monitoring Curves under Different Periods (H=0.234m)
(B) Numerical Simulation
The study employed the three-dimensional potential flow theory for multi-float coupling problems to analyze the dynamic characteristics of the two-raft WEC. This theoretical framework, grounded in potential flow theory, was also used to simulate some experimental conditions. By fitting and analyzing experimental and simulation data, the accuracy of the simulations was validated.
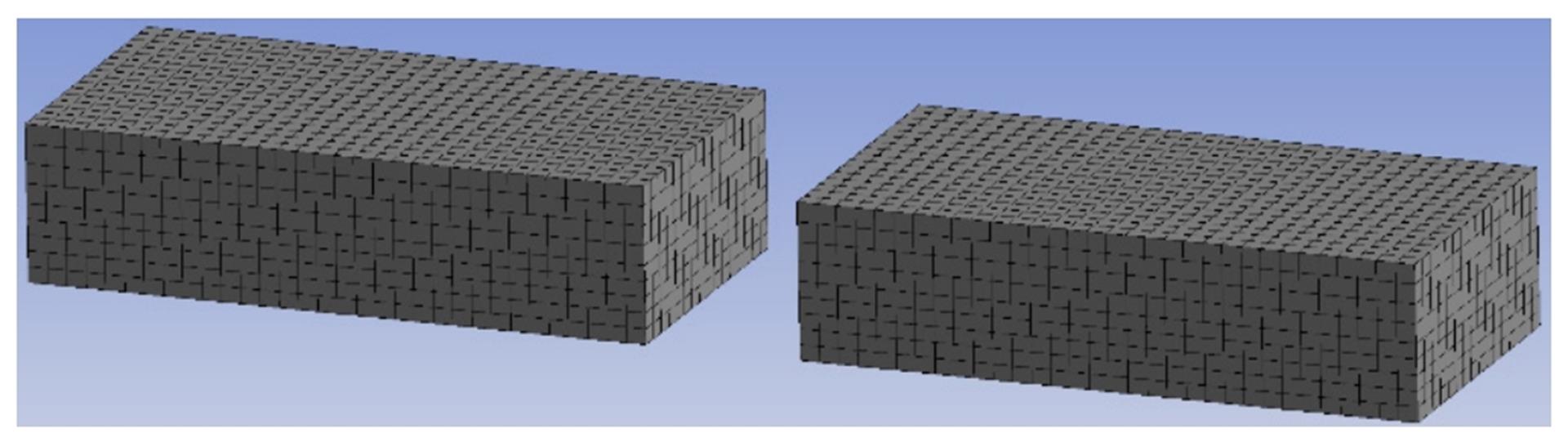
Methods of Numerical Simulation
AQWA (a submodule of the finite element software ANSYS) was utilized to simulate ocean conditions with specific parameters and analyze the coupling effects between multiple offshore structures. This method first obtained the hydrodynamic parameters of the floats in the frequency domain, then used Fourier transform to derive the wave forces, displacement, and velocity of the floats in the time domain.
Comparison Results Between Numerical Simulation and Experimental Model
Based on the experimental setup, the primary dimensions of the floats were determined. A hydrodynamic model was established in AQWA, with the experimental model serving as the numerical simulation model for constructing the two rigid float hydrodynamic models. Hinged connections were set between the two floats, and the wave conditions and mooring systems in the numerical simulations were configured according to experimental working conditions.
A small and acceptable gap was observed between experimental and numerical data. The numerical simulation results were slightly higher than the experimental data due to ANSYS's three-dimensional potential flow theory-based approach, which neglected fluid viscosity effects.
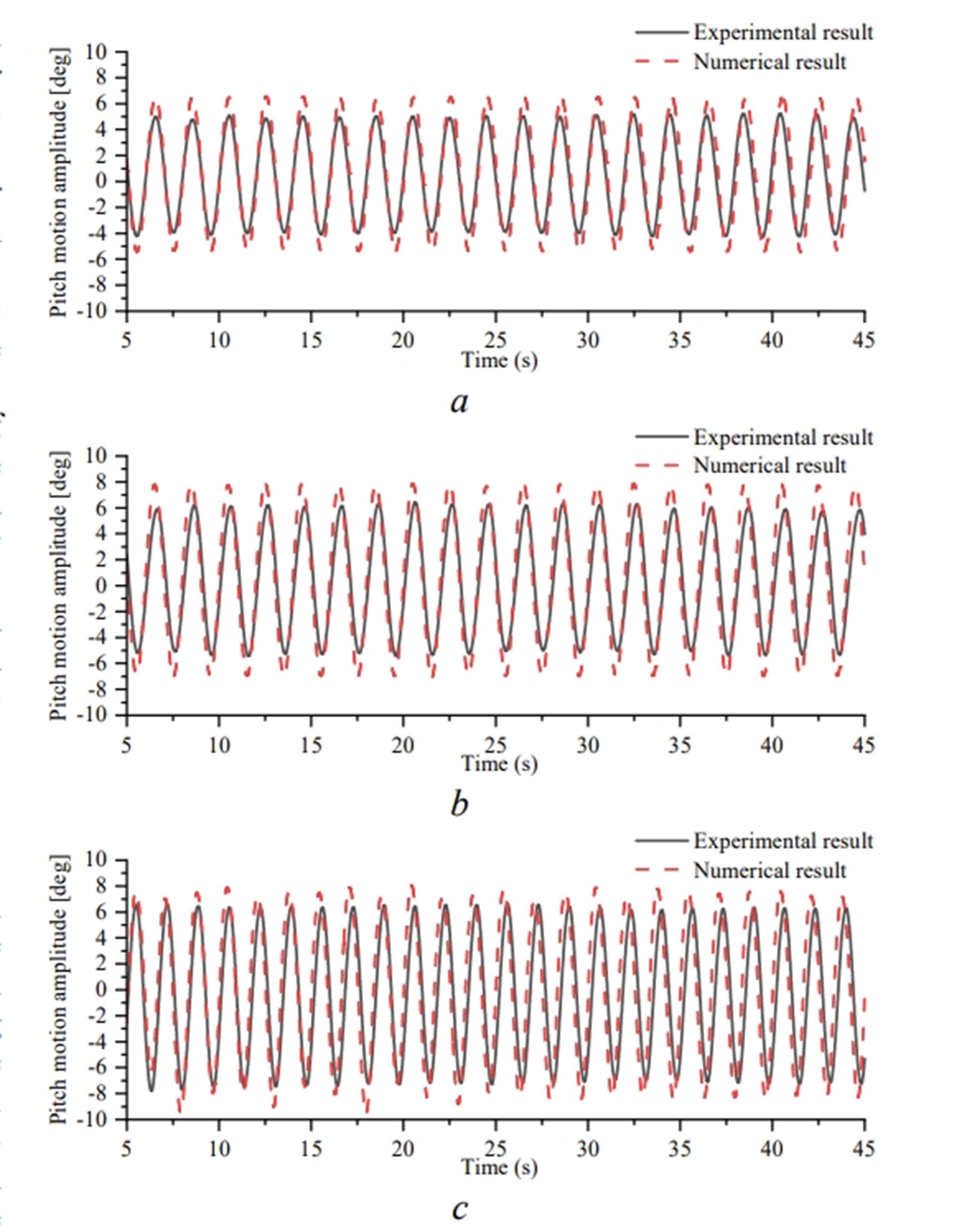
(a) Condition 1 for pitch response of the right-side floating body (H=0.185m, T=2.00s);
(b) Condition 2 for pitch response of the right-side floating body (H=0.234m, T=1.67s);
(c) Condition 3 for pitch response of the right-side floating body (H=0.185m, T=1.42s).
Numerical Simulation of Different Mooring Methods
Three mooring methods for the raft-type WEC were compared and analyzed in the time domain. The device's energy capture coefficient was introduced as a reference to select the optimal mooring method under the current parameter settings, maximizing the device's energy capture coefficient. Simulations showed that this mooring system could better fix the float in the wave direction without affecting the other end, thereby increasing the float's range of motion.
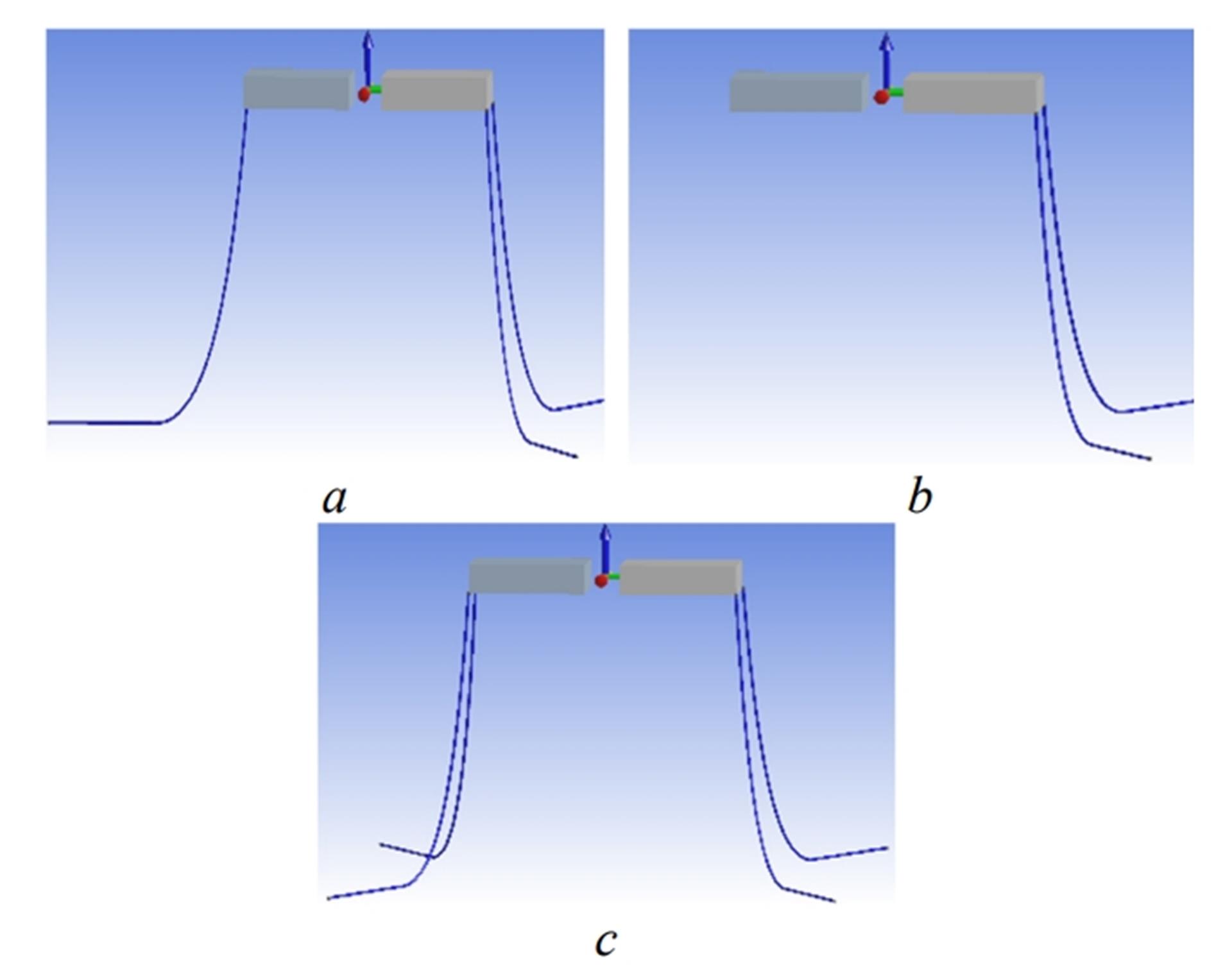
Mooring Configurations:
(a) Mooring at both ends of the right-side floating body and mid-section of the left-side floating body;
(b) Mooring at both ends of the right-side floating body, while the left-side floating body is unmoored;
(c) Mooring at both ends of both left and right floating bodies.
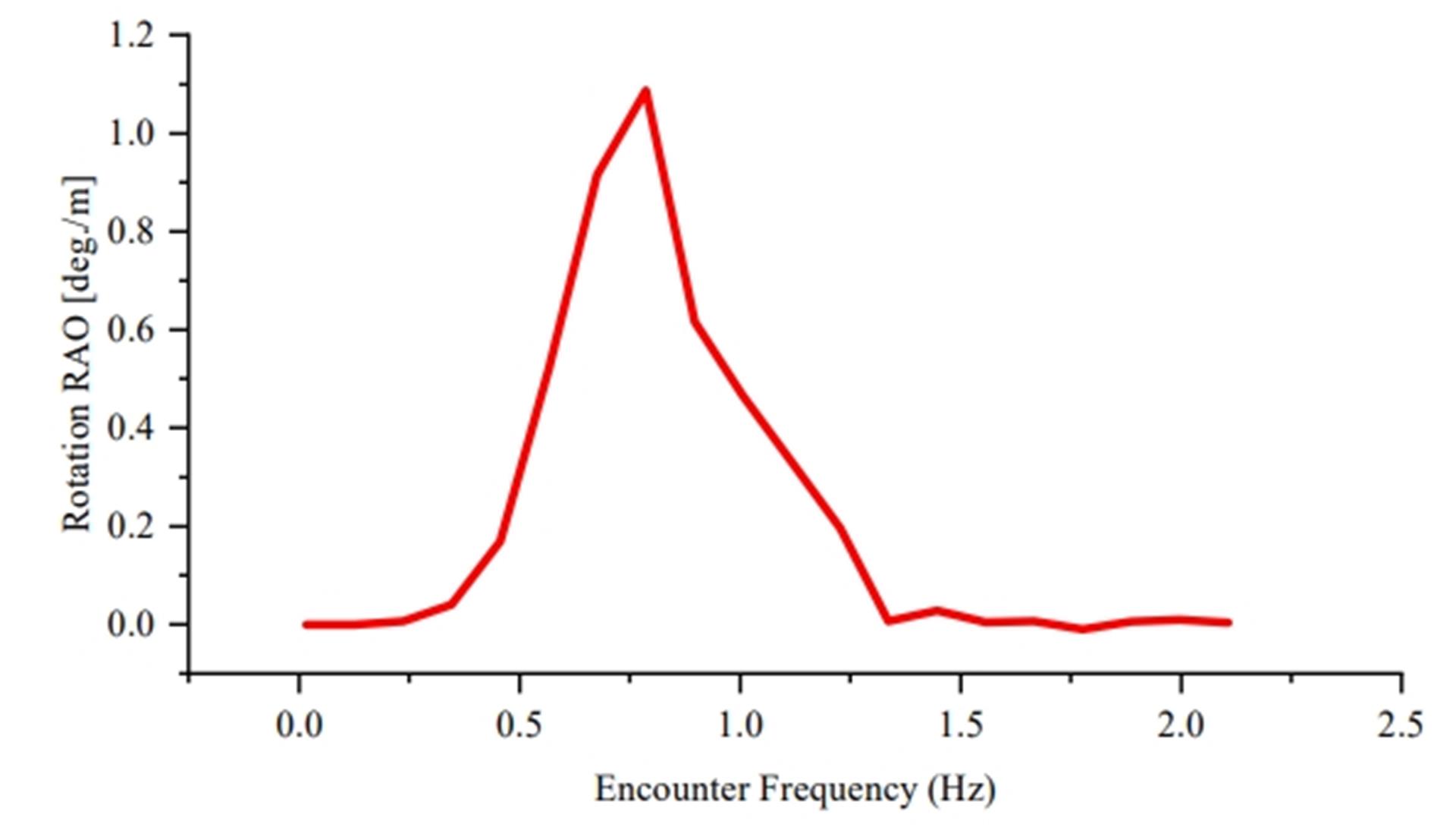
Numerical Simulation Results (Relative Pitch Response Amplitude Operator, RAO) for Case 1 to Case 3
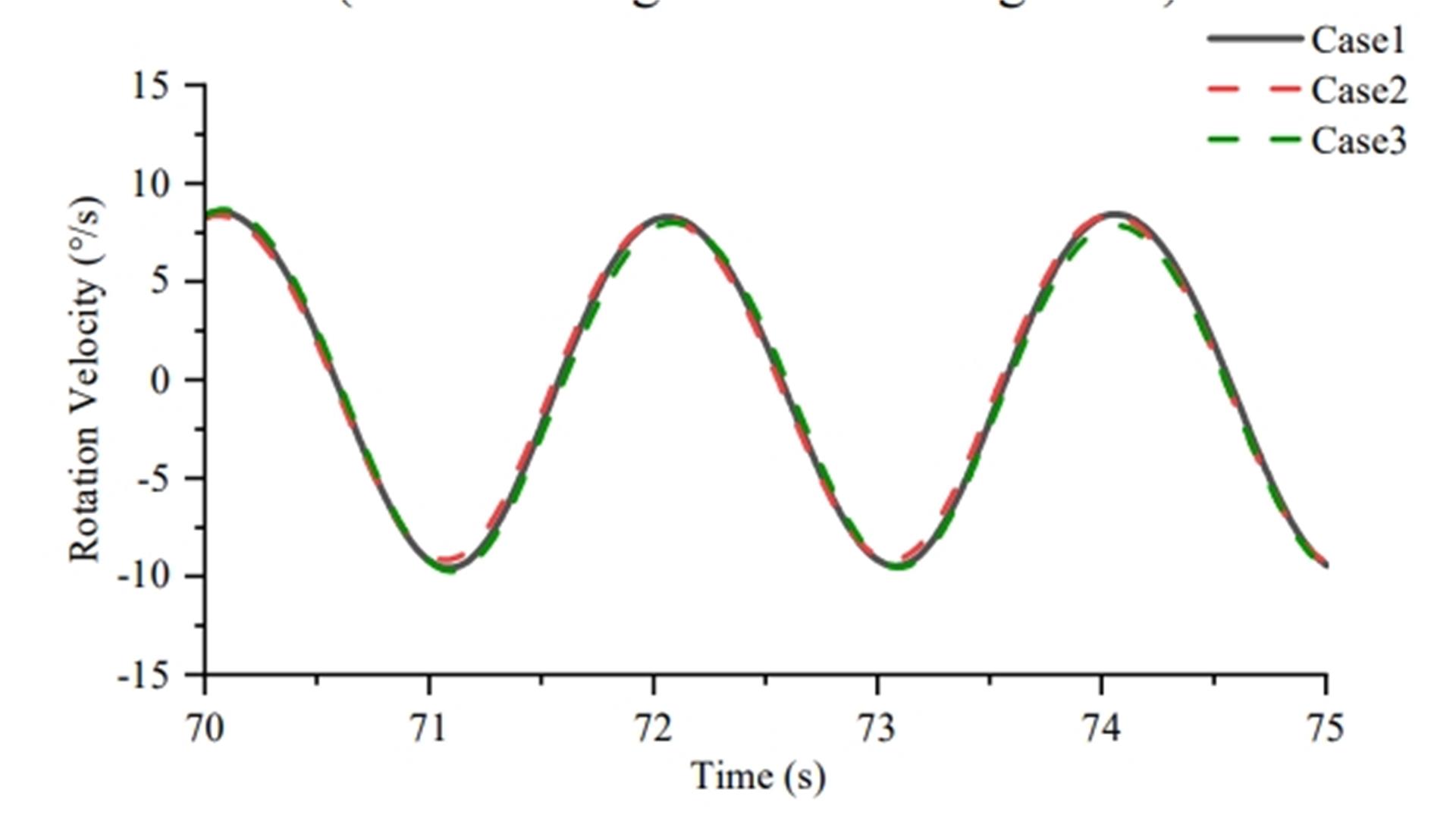
Comparison of Relative Pitch Angular Velocities:
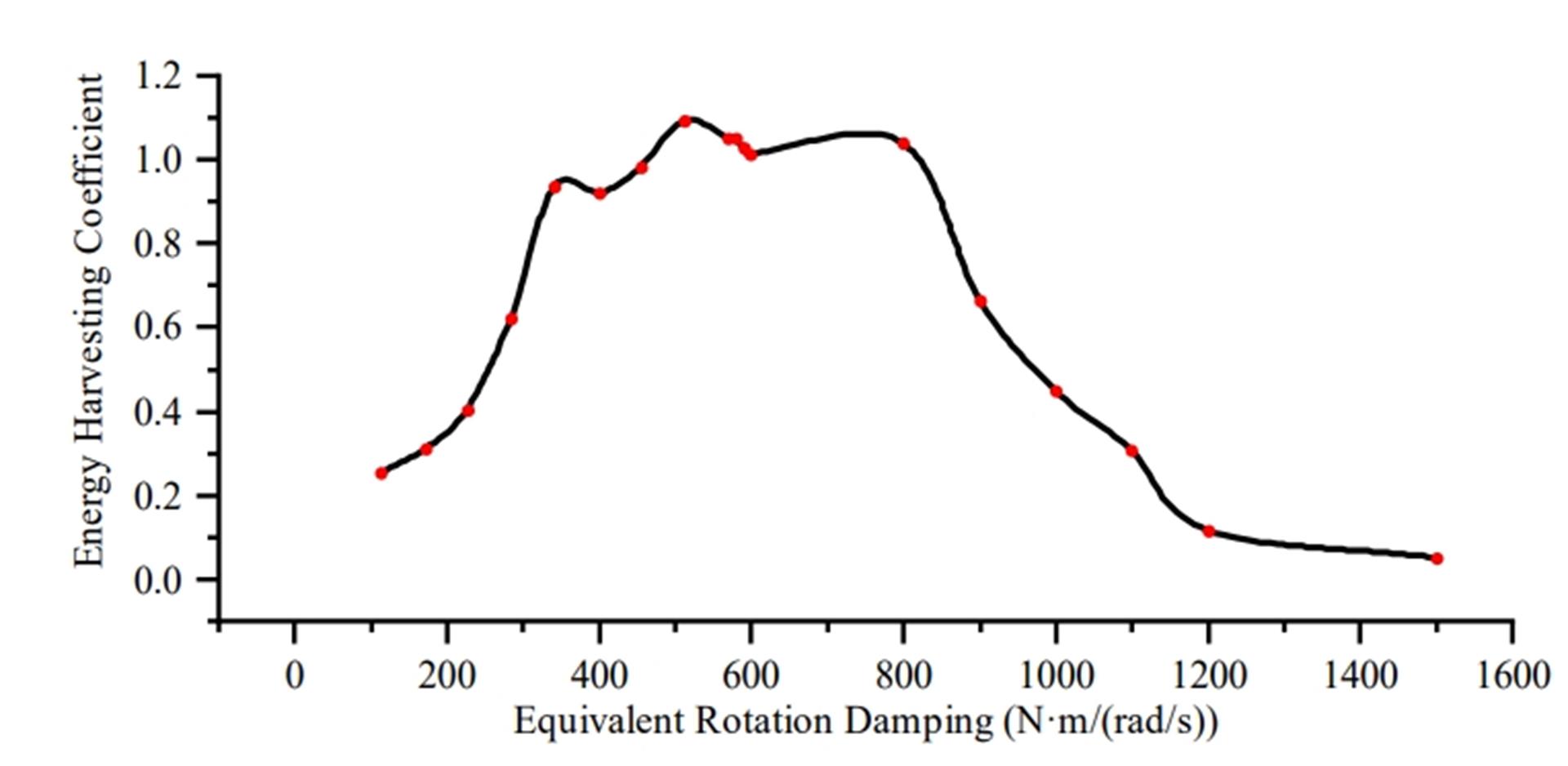
Numerical Simulation of PTO Equivalent Rotational Damping
The PTO damping value was set as a constant, and its impact on the device's energy capture was studied under specific wave height and period conditions. The study found that significant energy capture efficiency could only be achieved when the hinge damping was adjusted to an appropriate value.
III. Experimental Achievements
The double-anchoring design on both sides of the two-body float allows for greater fixation of the float in the wave direction. In contrast, the unanchored structure at the other end reduces the float's constraints to a certain extent, increasing its range of motion. This anchoring method enables the wave energy generator to efficiently capture wave energy even when the wave incidence direction changes. Based on the numerical simulation results and parameter settings in this paper, using a double-anchoring system for the right float can maximize the device's energy capture efficiency.
When studying different mooring methods, the longitudinal RAO curves of the two-body float exhibited an increasing and decreasing trend in frequency domain calculations. When the device's natural frequency approached the peak wave frequency, resonance occurred, enhancing the device's motion amplitude. Currently, the energy capture coefficient significantly exceeds 1.0, reaching a maximum of 1.16.
In the optimal damping study, the PTO damping was set to a specific value, and numerical simulations were conducted under certain wave conditions (T=1.81s, H=0.10m). As the damping varied from 1 to 1500 N·m/(rad/s), the energy capture coefficient initially increased and then decreased, with the optimal damping concentrated within the range of 400 N·m/(rad/s) to 600 N·m/(rad/s).
References:
[1] Changhai Liu. Research on the power capture ability of the two-raft type wave energy converter and its hydraulic power take off system [D]. Harbin Institute of Technology,2018. (In Chinese)
[2] Jianguo Dong. Numerical simulation of mooring system and structural optimization based on an elliptical and cylindrical raft wave energy conversion device [D]. National University of Defence Technology,2018. (In Chinese)
[3] Kraemer D R. Simulation of the motions of the McCabe Wave Pump system[C]//Proc. 6th European Wave and Tidal Energy Conference, Glasgow, UK. 2005: 251-258.
[4] Kraemer D R B. The motions of hinged-barge systems in regular seas[M]. The Johns Hopkins University, 2001, 11(3): 165~209.
[5] Zanuttigh B, Angelelli E. Experimental investigation of floating wave energy converters for coastal protection purpose[J]. Coastal Engineering, 2013, 80: 148-159.
Original Link:
https://www.mdpi.com/2077-1312/11/12/2352