
 CN / EN
CN / EN
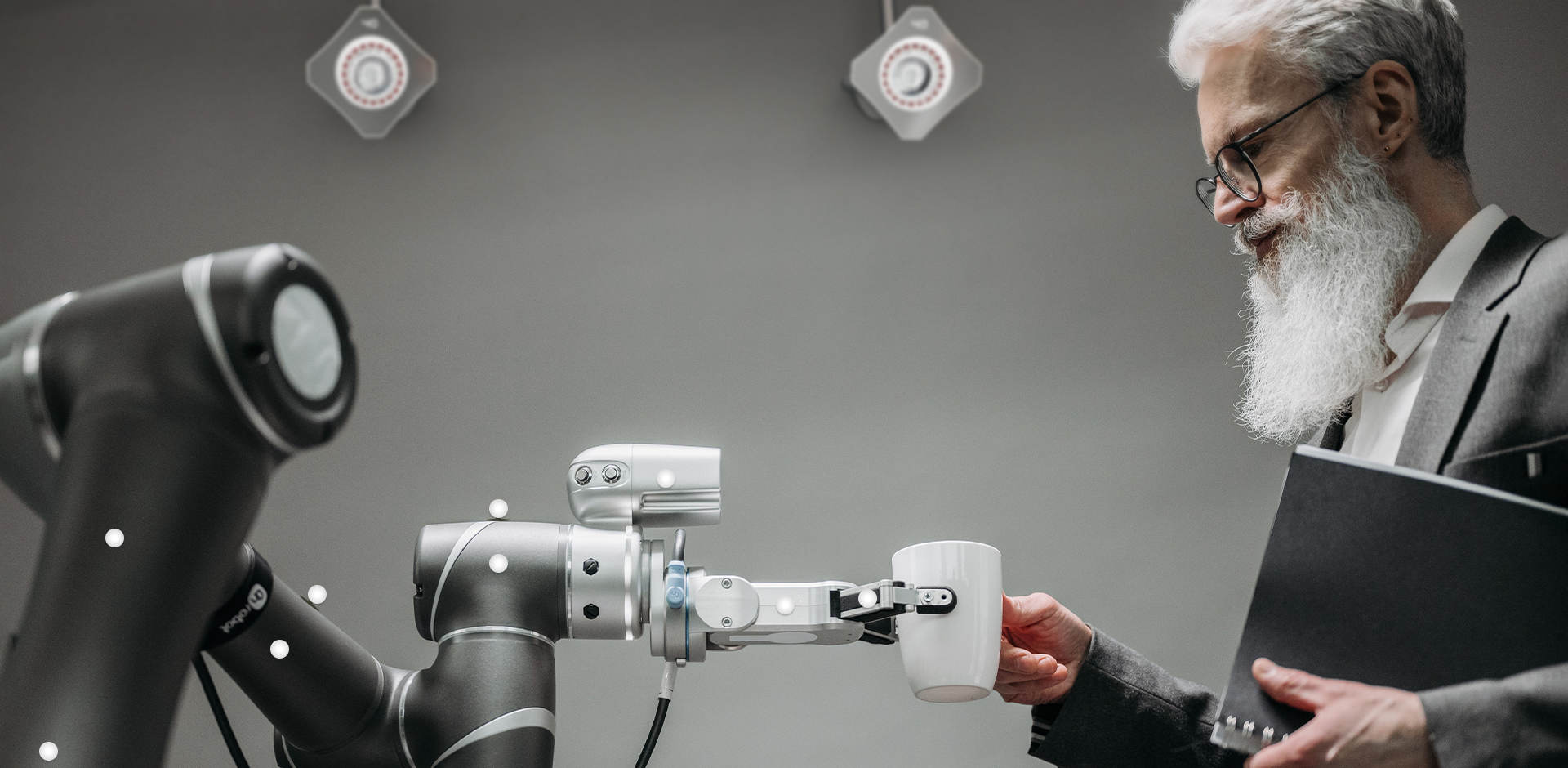
Robotics
It procures three-dimensional spatial trajectory coordinates, offering precise 6DOF tracking that is distinguished by its low latency, robust stability, and user-friendly interface. As such, it provides users with pivotal performance parameters.







































Robot
The Qingtong visual motion capture system can realize the positioning control of any robot, and can realize the measurement of various types of robots such as bionic robots, exoskeleton robots, and multi-legged robots, including but not limited to the head, torso, limbs, and external robotic arms.
01
The Chingmu optical motion capture system provides high-precision and low latency positioning measurement solutions. Provide stable and reliable data support for posture acquisition and positioning algorithm validation in robot testing research. Customized robot solutions such as humanoid robots, biomimetic robots, and service-oriented robots, including equipment kits, technical support, and solution design, not only optimize research and development efficiency, but also promote the progress of robot technology.
02
High precision capture and presentation, real-time data analysis and processing, forming a complete database reference for mechanical positioning and work trajectory, which is conducive to the research and practice of unmanned engineering machinery operation, and efficiently and accurately completes preset tasks.

03
Research and testing support for biomimetic robots, providing integrated solutions including motion capture systems, force measurement platforms, etc. for humanoid robots, quadruped robots (big dogs), and wheeled robots, enabling analysis of kinematic and dynamic data information. At the same time, professional guidance is provided in scene design, limb architecture, and other aspects to optimize robot performance, give robots new life, and assist in practical applications such as intelligent inspection, material transportation, and search and rescue.

04
Constructing diversified props and diverse scenes to provide a more convenient experimental method for robot control research. Including obstacle avoidance testing, environment simulation, role simulation, assisting robots to adapt to different environments, continuously improving new performance advantages, and achieving practical application efficiency.
05
Accurate tracking is the key to providing basic data for robot research. The optical motion capture system with Chingmu, combined with the minimum calibration algorithm, captures more accurate robot motion data. High data rate, low latency, and high precision capture reliable 3D data, ideally achieving accuracy below 20 µ m to ensure outstanding motion capture performance.
06
By combining a high sampling frequency of 380fps with real-time image processing algorithms, the delay can be reduced to within 2.6 milliseconds, accurately capturing robot motion data and forming visualized data, which is conducive to robot algorithm validation and control adjustment.
A field of view angle of 89 ° x89 ° can achieve seamless coverage of the robot's tracking area, increasing space utilization from 50% or even 30% to 100%. By combining visual algorithms, it is possible to quickly reconstruct and recognize the 3D environment of robots.
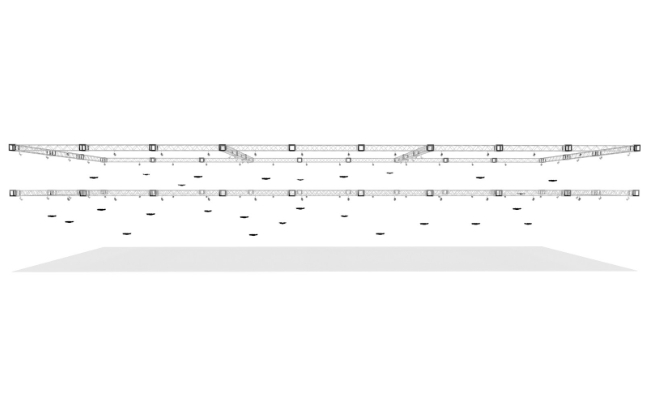
The system supports a capture range of over 1000 square meters, real-time tracking of over 300 rigid bodies with 6DOF, and with active cursor marking, enables large-scale robot cluster positioning and collaborative control, providing broad development prospects for industrial automation.
The system provides efficient and high-precision positioning measurement for robots, saving time and effort. High precision spatial positioning is used to verify the true value of the robot SLAM algorithm, ensure accurate and feasible operation, and improve the final research and development design.
Equipped with outdoor enhancement technology and protection technology, it can suppress sunlight and adapt to complex and changing environments. Active and passive marking points effectively improve capture accuracy and ensure presentation effectiveness. Provide convenience for outdoor testing research and algorithm verification of robots.
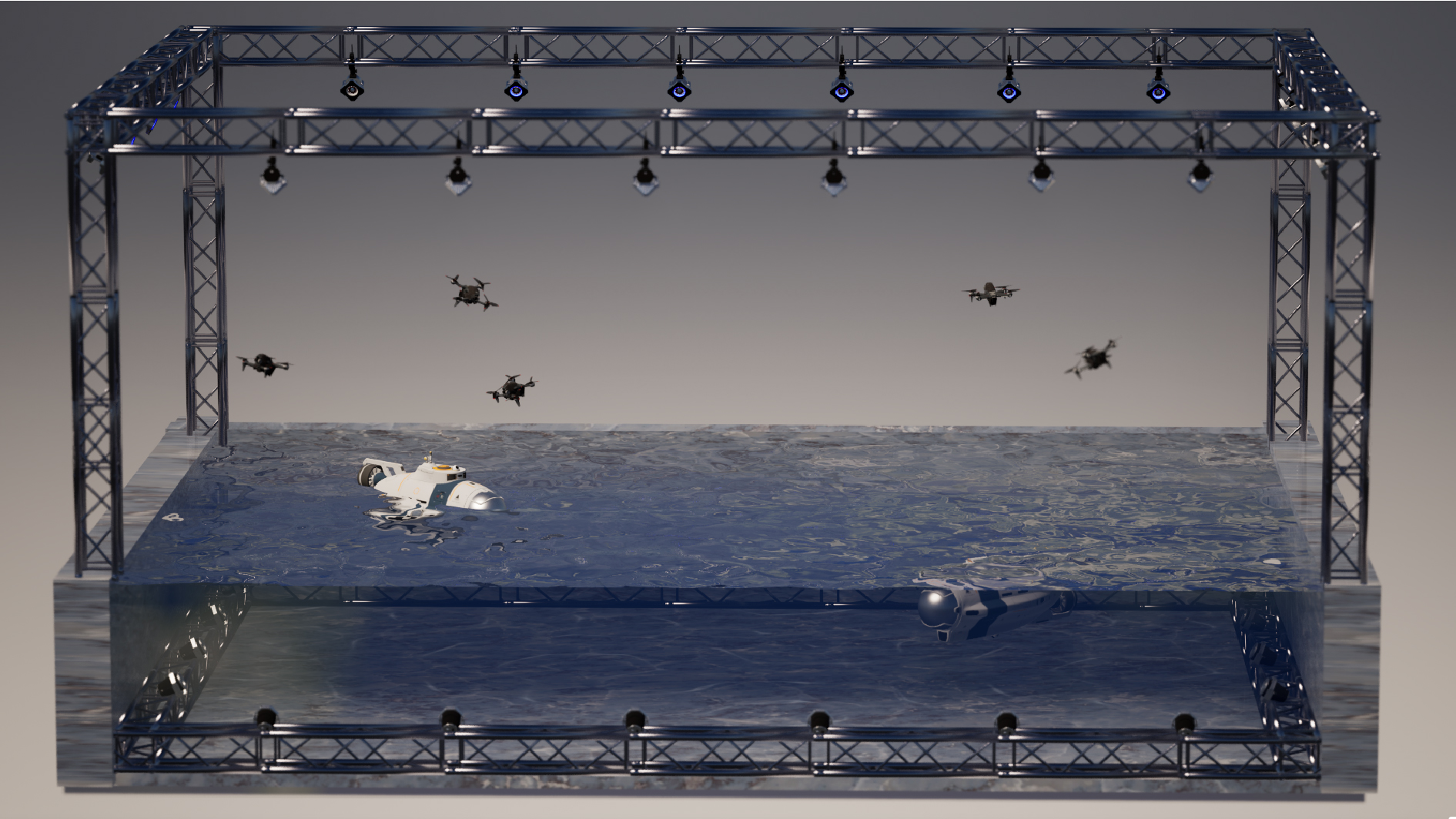
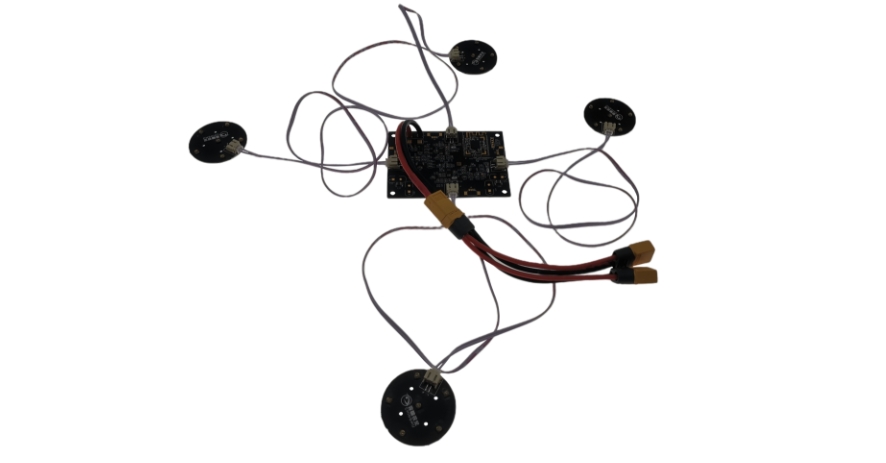
Active marking points combined with active light synchronizers can improve capture accuracy, expand capture distance, and efficiently achieve underwater positioning tracking and collaborative control. With unique algorithms for precise positioning and real-time tracking, customized solutions can be provided for control research, experimental teaching, and other application scenarios.
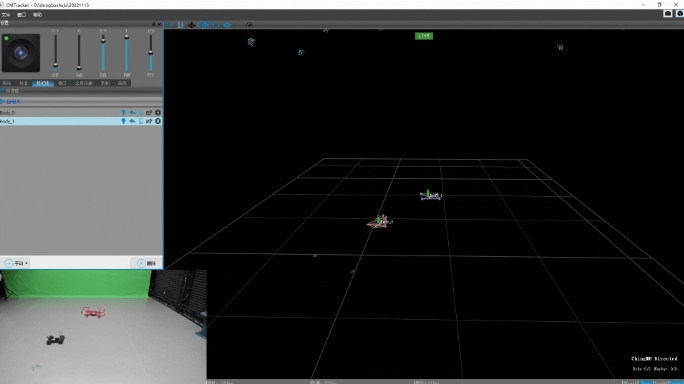
CMTracer is derived from the high-precision image processing algorithm and 10000 parameter distortion correction algorithm of the Institute of Automation, Chinese Academy of Sciences. With an ultra-low latency of 1.9ms, it can track 480 targets and improve the optical motion capture accuracy of robots such as vacuum cleaners, quadrupeds, and humanoid robots. Simple function settings, clear Chinese interface, one click operation, achieving efficient and accurate tracking.

The system has multiple language SDKs such as C/C++, C #, Python, etc., supporting various software and operating systems such as Matlab, Simulink, Ros, Android, Labview, etc. It can also provide services such as algorithm development and upper layer application software development.

Our self-developed and self-produced optical motion capture system has 100% independent control over parts design, production and manufacturing, sales and service, logistics and distribution. Our professional team provides you with comprehensive technical support and customized services. Including demonstrations of various scenarios and technical interpretations, to help you gain a detailed understanding of product features. In addition, we provide rental services for dozens of animal capture sheds across the country, covering the entire process of project implementation, such as action databases, technical support, shooting guidance, and other services. 24/7 uninterrupted service, achieving rapid online response within 15 minutes, providing worry free protection for your creations.

Launch a three-month free trial service, upgrade the hardware warranty period, and extend the warranty to ten years, fully ensuring equipment quality and user experience, always putting users at the center, and ensuring user rights.