
 CN / EN
CN / EN

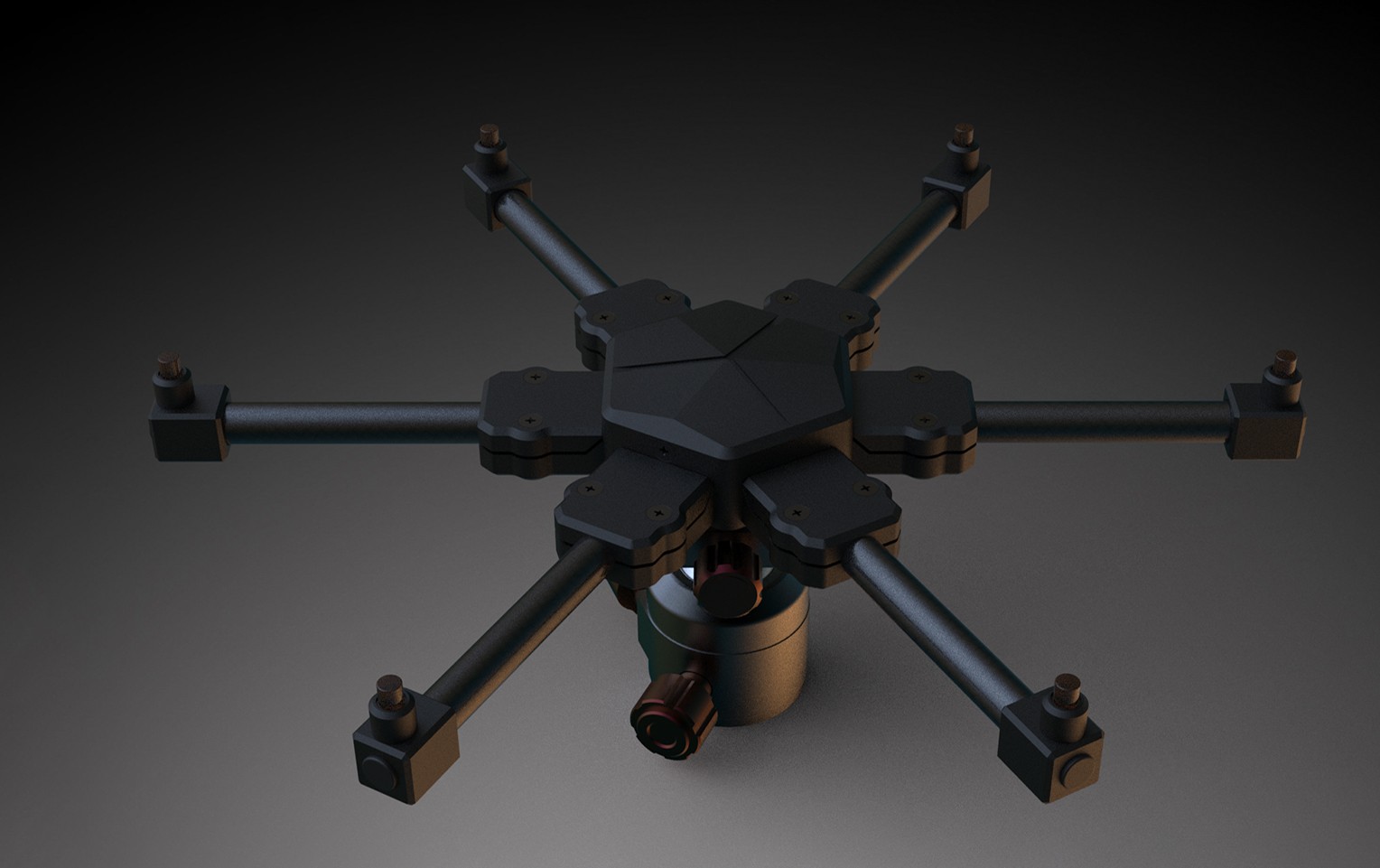
Unmanned Aerial Vehicles
The system is compatible with both active and passive illuminations, making it well-suited for diverse complex environments. This broad applicability extends to fields such as trajectory positioning, cooperative control, autonomous obstacle avoidance, and tracking mechanisms.










































Formation flying
Excellent pixel rate, small size, sub-millimeter accuracy and passive tracking distance of up to 30 meters enable Qingtong optical motion capture system to provide low-latency, strong stability, easy-to-use and accurate 6DOF tracking for drones, providing key points for users Performance parameters are widely used in fields such as trajectory positioning, collaborative control, autonomous obstacle avoidance and following.

01
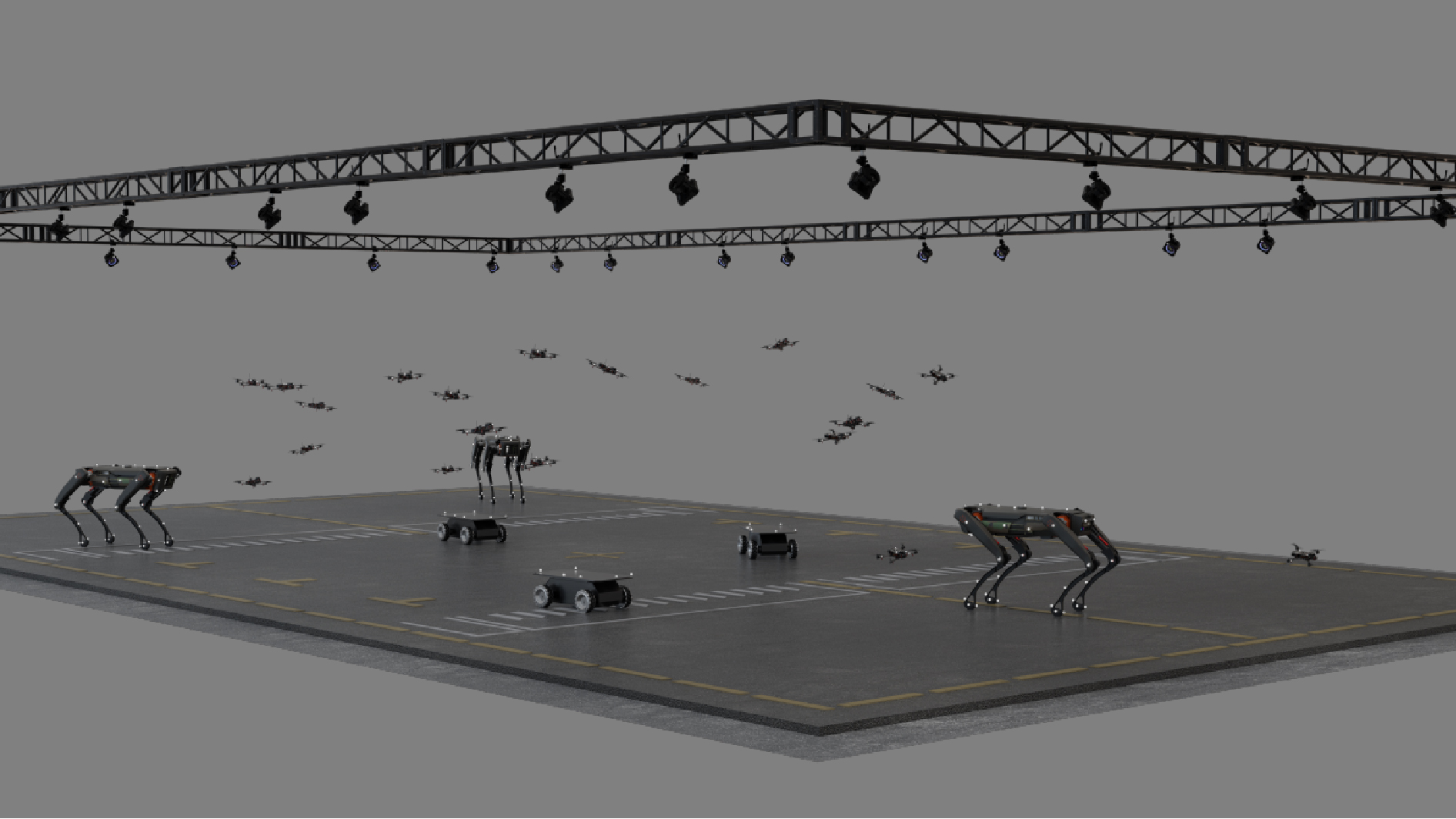
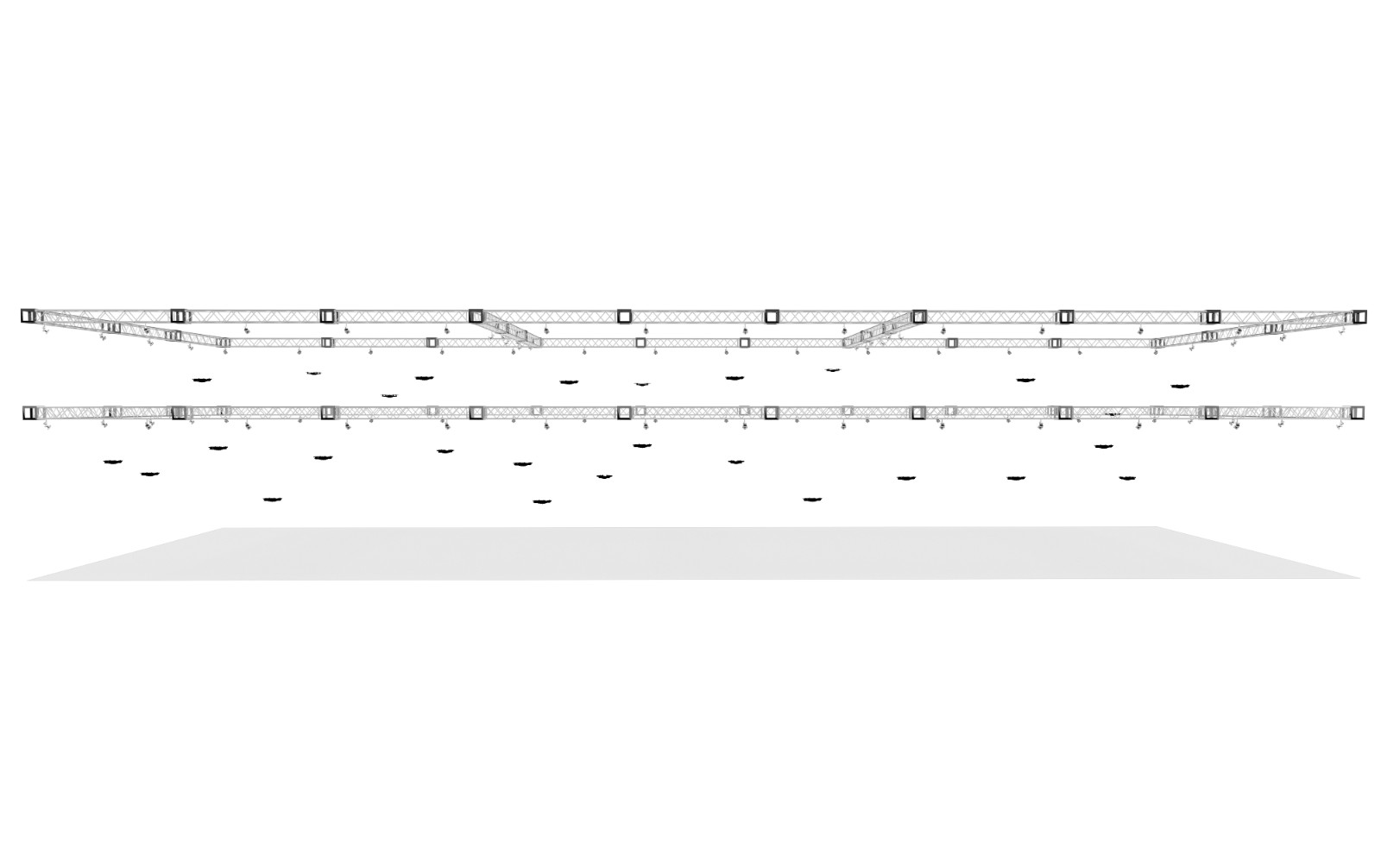
The high-precision infrared optical motion capture system independently developed and produced by Chingmu has the function of real-time tracking, measurement, and recording of the trajectory of points and the motion posture of rigid bodies in three-dimensional space. The high-resolution grayscale analysis can easily construct a large-scale motion capture space and positioning measurement, helping drones/vehicles achieve autonomous navigation and precise positioning. Improve the stability and safety of drone/vehicle movements, enhance autonomous mobility and reliability, and optimize control systems.
02
Customized scientific research application services, including motion capture cameras, software, integrated sets of drones/vehicles, quadruped robots, etc., can meet multi scenario applications such as indoor and outdoor positioning and tracking, collaborative control, etc.
03
The system supports a capture range of 1000+square meters and real-time tracking of 300+rigid bodies with 6DOF. With active cursor marking, large-scale cluster positioning is achieved, making high-density drone cluster tracking possible.

03
Relying on the advantages of motion capture, it provides support for algorithm validation and drone obstacle avoidance testing, facilitating timely adjustment of control strategies, making drone/vehicle testing research more accurate, and practical application operations more flexible, safe, and reliable.
04
Equipped with outdoor enhancement technology and protection technology, it can suppress sunlight and adapt to complex and changing environments. Active and passive marking points effectively improve capture accuracy and ensure presentation effectiveness. High precision, low latency, supporting capture areas of thousands of square meters, real-time tracking of hundreds of targets, providing convenience for outdoor testing and research, flight demonstrations, algorithm verification, etc. of unmanned aerial vehicles.
05
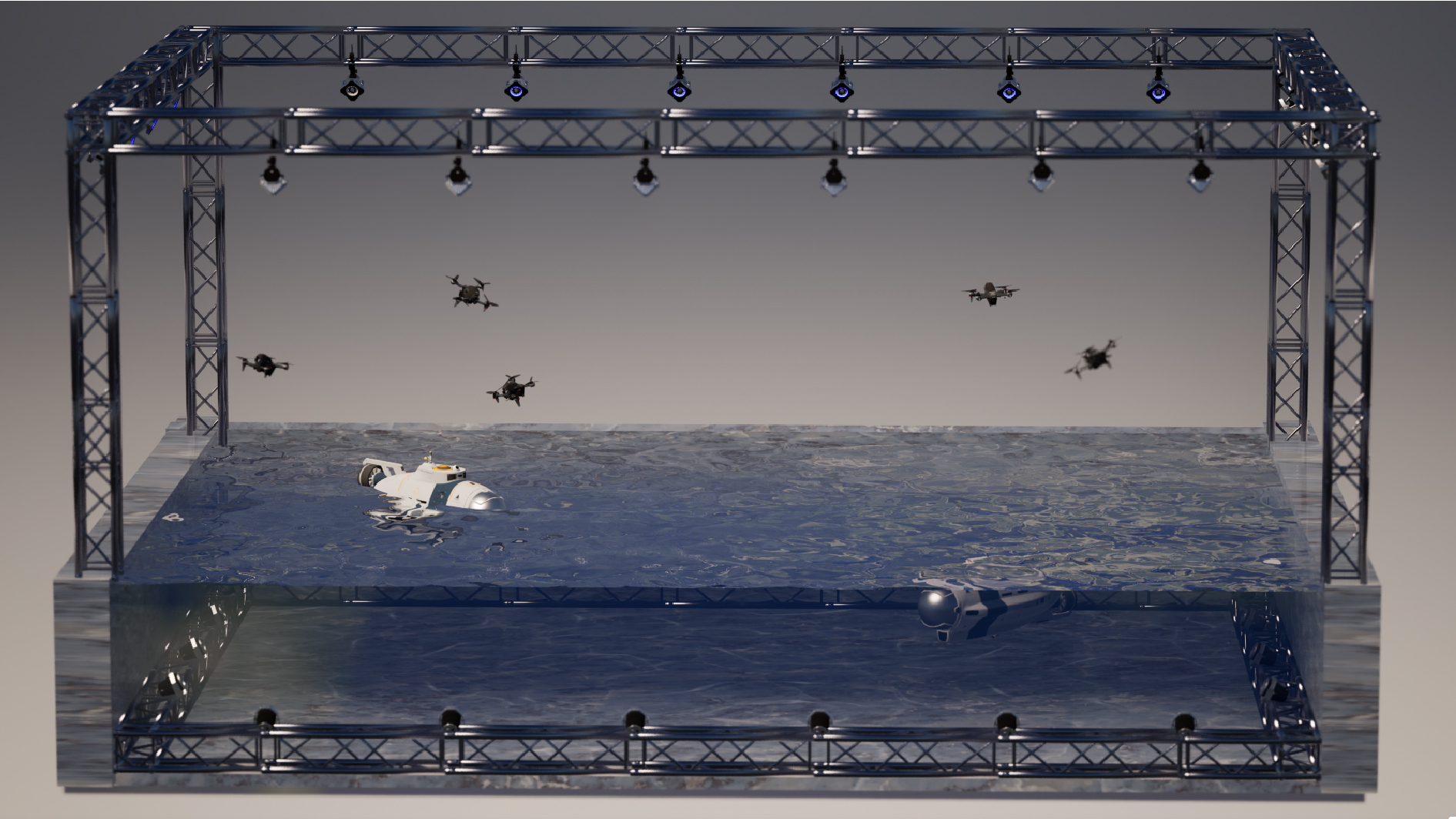
Combining active and passive marking points, it can improve capture accuracy, expand capture distance, and efficiently achieve coordinated control of water, water, and underwater. With unique algorithms for precise positioning and real-time tracking, it provides customized solutions for control research, experimental teaching, and other application scenarios.
06
High precision is the core of unmanned aerial vehicle tracking systems. Combined with calibration algorithms, capture more accurate and reliable 3D data to accurately locate drone movements. The multi-target tracking function provides high-precision spatial positioning for land air cooperation, and provides validation truth for UAV path planning and SLAM algorithm, ensuring accuracy and feasibility.
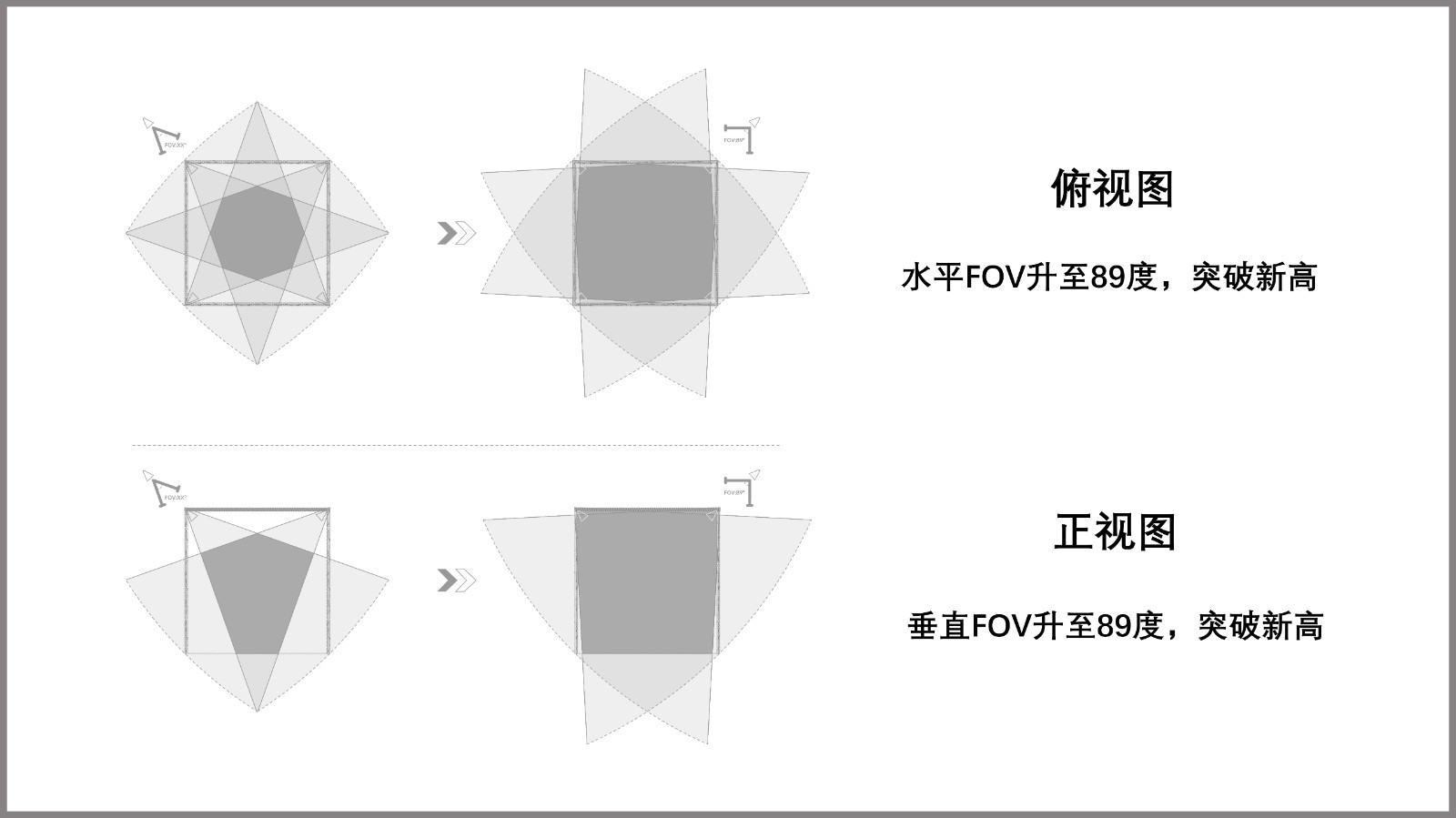
The same number of cameras significantly improves the effect. A field of view angle of 89 ° x89 ° can cover the tracking area of drones without blind spots, increasing space utilization from 50% or even 30% to 100%. Reduce costs and simplify system configuration while maintaining testing effectiveness.
By combining a high sampling frequency of 380fps with real-time image processing algorithms, the delay can be reduced to within 2.6 milliseconds, accurately capturing the high-speed motion state of the drone, presenting the attitude trajectory in real time, and optimizing the control strategy.
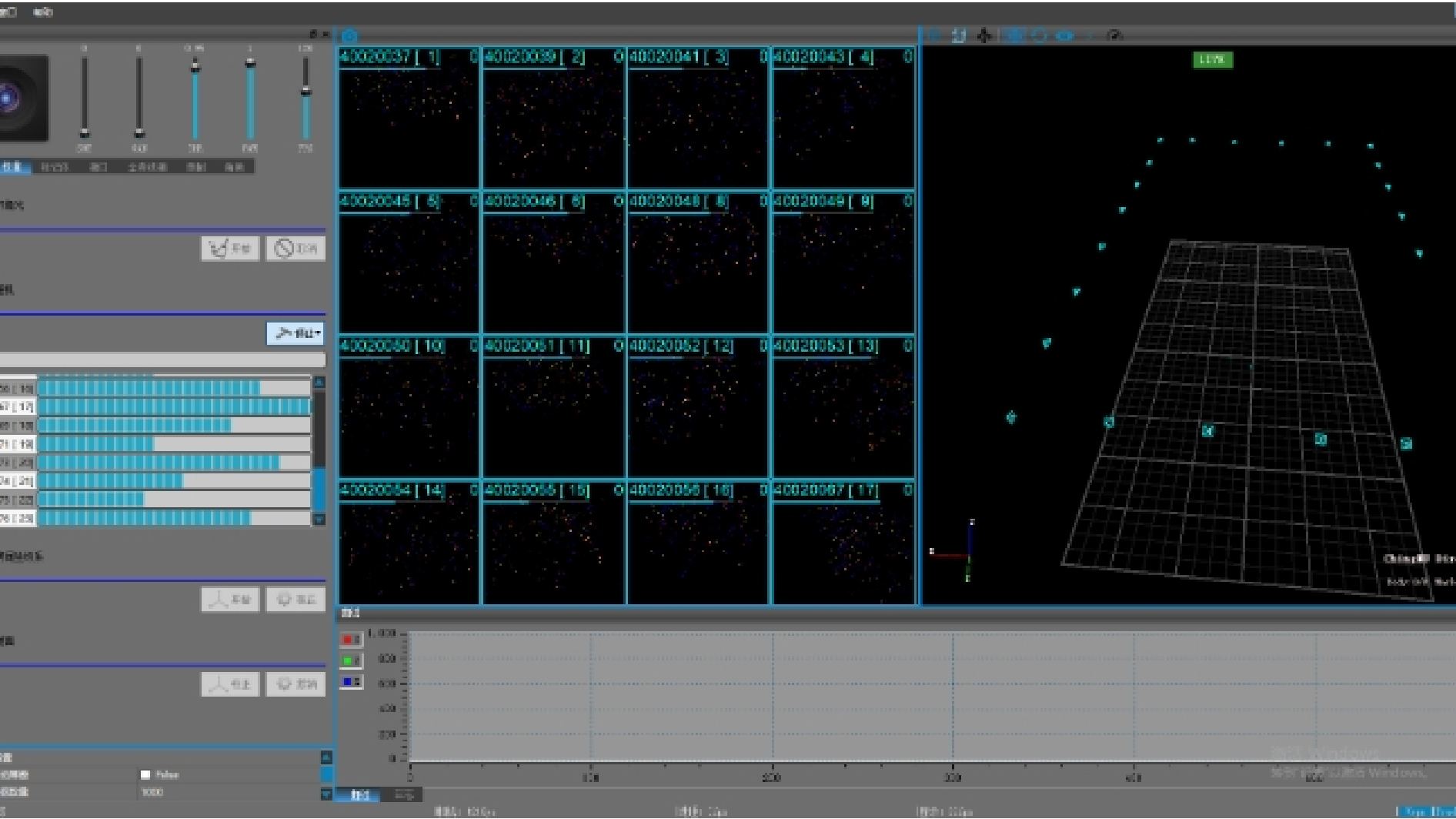
CMTracer originates from the high-precision image processing algorithm and 10000 parameter distortion correction algorithm of the Institute of Automation, Chinese Academy of Sciences. With a low latency of 1.9ms, it can track nearly a thousand targets and improve the optical motion capture accuracy of unmanned aerial vehicles. Simple function settings, clear Chinese interface, one click operation, achieving efficient and accurate tracking.
The high-precision motion capture system is suitable for robot algorithm validation. We have provided customized optical motion capture solutions for multiple universities and assisted in completing experimental research to validate the SLAM algorithm for unmanned vehicle/aircraft research. By collecting testing data on the direction, position, and speed of unmanned vehicles/machines, the accuracy of the code is verified and the final R&D design is improved.

The system has multiple language SDKs such as C/C++, C #, Python, etc., supporting various software and operating systems such as Matlab, Simulink, Ros, Android, Labview, etc. It can also provide services such as algorithm development and upper layer application software development. Ask R&D for additional interfaces.

Our self-developed and self-produced optical motion capture system has 100% independent control over parts design, production and manufacturing, sales and service, logistics and distribution. Our professional team provides you with comprehensive technical support and customized services. Including demonstrations of various scenarios and technical interpretations, to help you gain a detailed understanding of product features. In addition, it provides rental services for dozens of animal capture sheds in multiple parts of the country, has a rich action database, and can remotely share and experience experimental systems, which is conducive to breaking space and equipment limitations. 24/7 uninterrupted service, achieving rapid online response within 15 minutes, providing worry free protection for your creations.

Launch a three-month free trial service, upgrade the hardware warranty period, and extend the warranty to ten years, fully ensuring equipment quality and user experience, always putting users at the center, and ensuring user rights.