谷歌算法:用动作捕捉系统,让机器人识别位置
Source:
2022
May. 20
By Rachel England


Google Robotics
毫无疑问,未来机器人将在我们的生活中扮演越来越重要的角色,但要达到它们真正有用的阶段,仍有许多挑战需要克服——包括在没有人类干预的情况下导航。是的,我们在一个阶段算法将允许一个机器人学习如何移动,但是这个过程是复杂的,需要耗费大量的人力投入,无论是在捡机器人摔倒时,或移动它回到训练空间移开了但是来自谷歌的新研究可以使这个学习过程更加直接。
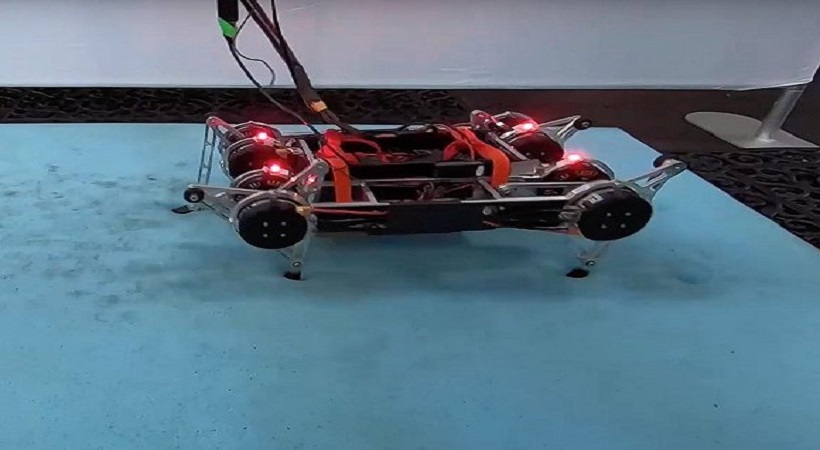
通过成功地调整现有的算法,谷歌Robotics的研究人员能够让一个四条腿的机器人学会如何在几个小时内独自向前、向后和转弯。首先,他们废除了环境建模。通常,在机器人有机会学习走路之前,会在虚拟环境中的虚拟机器人中测试算法。虽然这有助于防止损坏实际的机器人,但模拟砂砾或柔软的表面是非常耗时和复杂的。
因此,研究人员从一开始就在现实世界中进行训练,因为现实世界提供了自然环境的变化,机器人可以更快地适应各种变化,比如台阶和不平坦的地形。然而,人工干预仍然是必要的,研究人员不得不在机器人的训练过程中数百次操纵它。于是他们着手解决这个问题,通过限制机器人的活动范围,让它同时学习多种动作来解决这个问题。如果机器人在向前走的时候走到了它的领地边缘,它就会认识到自己的位置并开始向后走,从而在减轻人类干预的同时学习一项新技能。
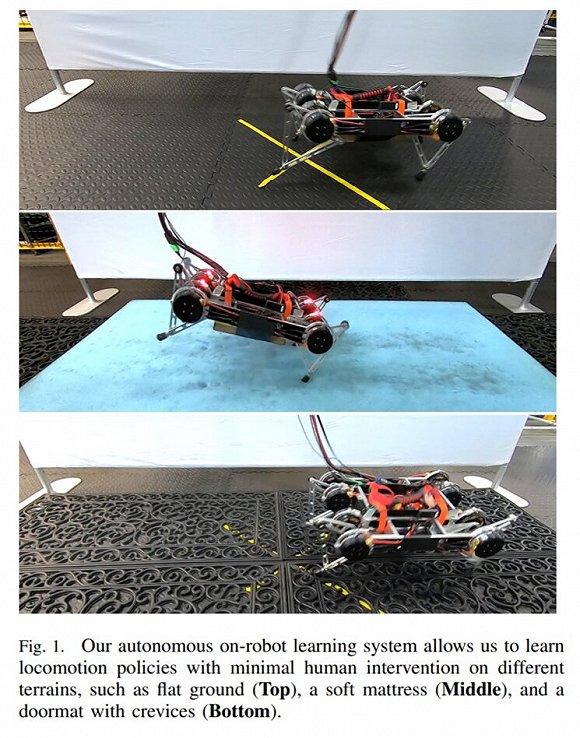
有了这个系统,机器人可以通过反复试验,最终学会如何在多个不同的表面自主导航,最终不再需要人类的参与——这是让机器人变得更有用的一个重要里程碑。然而,这项研究也有其局限性。当前的设置使用了一个架空的动作捕捉系统,允许机器人识别自己的位置——这是任何现实世界的机器人应用程序都无法复制的。尽管如此,研究人员希望将新算法应用于不同类型的机器人,甚至是在同一学习环境下的多个机器人,从而创造出一个知识和理解的体系,这将有助于所有领域的机器人技术的发展。
青瞳视觉编译(如版权问题,请及时联系青瞳进行删除,给您带来的不便请谅解)