踝关节分析揭示了行走的动力学
走路只是把一只脚放在另一只脚的前面,但每一步都有复杂的生物力学因素发生——尤其是在脚踝。
亚利桑那州立大学(Arizona State University) Ira a . Fulton工程学院(Ira a . Fulton engineering school of engineering)机械航空宇宙工程系助理教授hyungrae Lee用一种独特的方法研究了行走时踝关节的动态运动。
这项工作是与密歇根大学安娜堡分校机械工程助理教授埃利奥特·劳斯和麻省理工学院首席研究科学家Hermano Igo Krebs合作开发的,并于2016年首次发表在《IEEE健康与医学转化工程杂志》上——正在帮助改善康复和人机交互应用。
“这项研究和相关研究的结果不仅有助于我们对各种现实生活任务条件下的正常和病理脚踝行为的科学理解,同时也要开发能够提供最佳支持而不妨碍下肢自然功能的辅助或康复设备,”李说,他在过去几年里一直在这一研究的基础上进行研究。
在过去5年里,李教授的论文在《IEEE健康与医学转化工程杂志》(Journal of Translational Engineering in Health and Medicine)中被引用次数位居第二,并在2016年获得了IEEE工程医学和生物学学会奖论文奖(IEEE Engineering Medicine and Biology Society prize paper Awards)二等奖。
亚利桑那州立大学助理教授hyungae Lee(右)结合机器人辅助神经康复和人类脚踝、肩膀和其他关节的神经肌肉控制的专业知识,开发了理解和帮助人类健康的创新平台。艾丽卡·格罗内克/亚利桑那州立大学
分析脚踝
走路的技巧,或步态,由两个主要部分组成。站姿阶段包括脚停留在地面上,而摆动阶段包括另一条腿向前摆动以迈出下一步。
踝关节阻抗——关节位置和运动中的旋转力之间的关系——是人类神经肌肉系统的一个基本部分,它解释了行走时发生的能量交换。
Lee说:“对这一特性的量化对于理解人体的稳定性和行走功能的质量至关重要。”“在我们发表这项研究之前,几乎所有之前报道的关于踝关节阻抗量化的研究都严格限于静态姿势条件,比如坐着和安静站立的位置,而且没有系统的方法来量化动态行走时的踝关节阻抗。”
在这些研究中,研究人员使用运动分析、3D运动捕捉和力板传感系统全面了解踝关节生物力学,但这些方法不允许对阻抗的研究。因此,李和他的合作者开发了一种不同的方法。
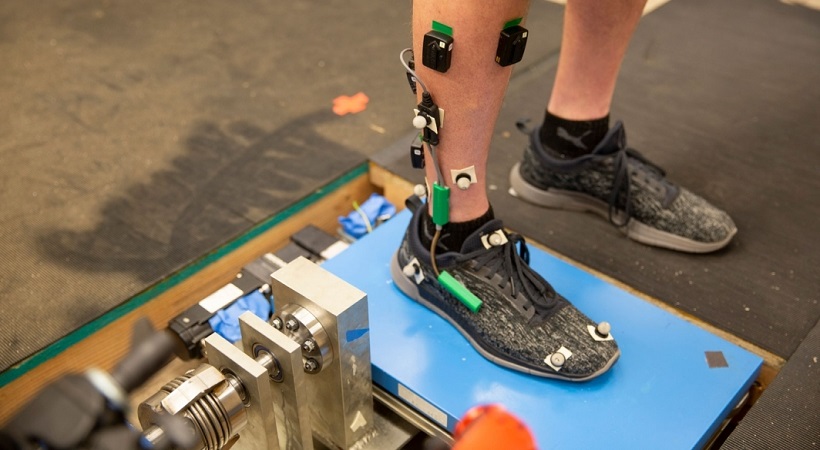
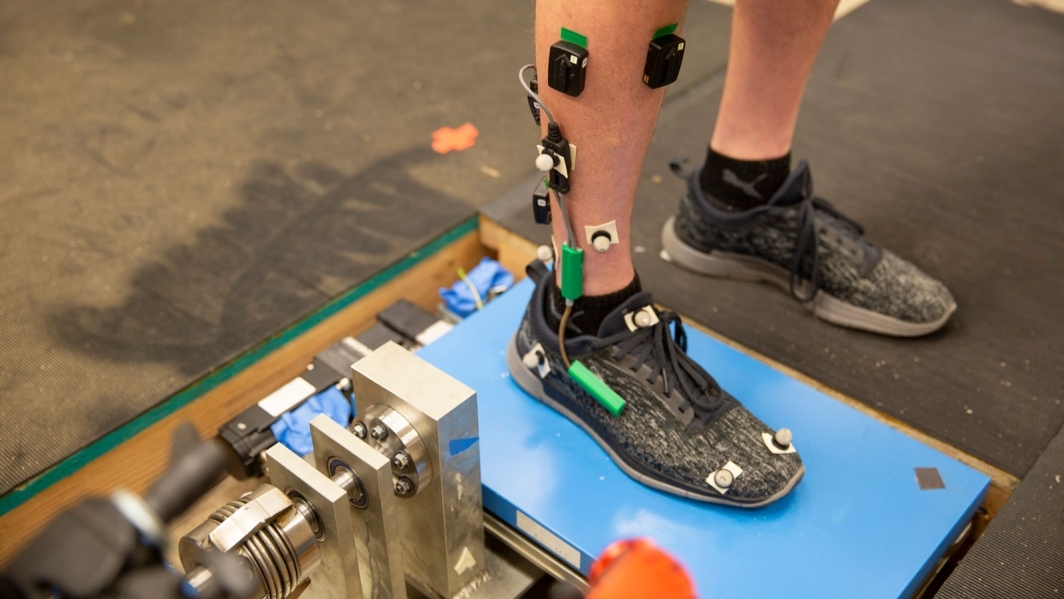
他们的系统在2016年获奖论文中描述,包括两个机器人平台:一个嵌入地面,研究对象可以在上面行走,另一个戴在脚踝上,在行走的姿势和摆动阶段对脚踝造成扰动。
然后,该团队通过分析输入扰动和相应的输出响应,使用系统识别来量化踝关节阻抗。
Lee说:“这种综合方法使我们能够可靠地描述行走过程中整个步态周期的踝关节阻抗,这在传统的运动分析设置中是无法实现的。”
与静态海报研究相比,Lee和他的合作者的方法在量化阻抗方面同样有效和可靠。他们还发现,踝关节阻抗可以通过三个部分精确地近似:踝关节的刚度、吸收扰动的能力(阻尼)和保持运动或静止的趋势(惯性)。数据显示,在步态周期中,踝关节僵硬程度得到了最大程度的调整。
李说:“关节僵硬是控制人机交互机器人和进行神经康复以改善功能的主要重点之一。”
由李的研究小组开发的机器人平台。它包括新颖的功能,如在多维空间驱动踝关节和模拟各种柔顺表面条件的能力。Lee正在使用该平台进行后续研究,以调查在各种任务中健康步态和受损步态的踝关节阻抗。
艾丽卡·格罗内克/亚利桑那州立大学

李氏神经肌肉控制和人类机器人实验室的一名学生演示了用于运动疗法的透明机器人辅助康复框架。这个机器人平台由国家科学基金会教师早期职业发展计划(Career)奖资助开发,将提高机器人辅助中风幸存者康复的效果。
艾丽卡·格罗内克/亚利桑那州立大学
修复脚踝和推进机器人互动
这种对踝关节生物力学的加深理解有助于机器人康复和辅助设备,包括假肢、外骨骼和平衡训练平台。为了帮助有步行障碍的人,来自健康个体阻抗谱的数据可以作为基线,帮助创建训练锻炼干预措施,以纠正改变的踝关节行为。
Lee在他的实验室——亚利桑那州立大学的神经肌肉控制和人类机器人实验室——的这项研究的基础上,研究了在各种动态任务条件下的踝关节阻抗,研究对象是步态健康的人和患有神经损伤(如中风或多发性硬化症)的人。
他的实验室团队也使用他们为踝关节阻抗开发的方法来研究其他肢体和关节的阻抗。
“例如,我们正在工作的量化肩关节阻抗和上肢阻抗,它将被用于开发一个新的robot-aided肩膀康复,康复的框架和一个高性能的安全稳定上肢外骨骼机器人的工业应用,”李说。
第一个项目由美国国家科学基金会教师早期职业发展计划(Career)奖支持,第二个项目由他与机械工程助理教授施正勇合作,获得美国国家科学基金会(NSF)国家机器人计划(NRI)奖支持。
除了人类健康和增强应用,李开复论文中的研究成果也可以用于机器人领域。机器人阻抗控制器是一种很受欢迎的控制器,它允许机器人控制肢体运动,这对人机交互尤为重要。本文的研究结果可直接用于机器人阻抗控制器的创新。
在亚利桑那州立大学开始了多产的机器人和康复事业
2016年发表在IEEE Journal of Translational Engineering in Health and Medicine上的这篇论文,是李作为亚利桑那州立大学物质、运输和能源工程学院(富尔顿学院六所学院之一)的教员发表的第一份期刊。
他有许多研究成功之后,包括收入2019 NSF事业奖,2021年新研究员奖从亚利桑那州卫生部门服务,赢得可穿戴机器人协会2020年WearRAcon创新挑战他的学生开发了一种软活跃中风康复机器人踝足矫形器。
“富尔顿学院和(物质、运输和能源工程学院)院长Lenore Dai一直在以多种方式支持我继续和扩大我的研究,并在富尔顿学院和硅谷以外的临床合作者中开始了几个新同事,”Lee说。我的学术导师(生物与健康系统工程学院,另一个富尔顿学院)马可·桑特洛、瑟蒙·洛克哈特和詹姆斯·阿巴斯都支持我,并承认我的研究的潜力。当然,如果没有我实验室里现在和过去的学生们的辛勤工作,所有这些研究项目是不可能完成的。”
青瞳视觉编译,其目的是为了将更好的内容分享给更多人,版权依旧归原作者所有。若有涉及侵权请予以告知,我们会尽快在24小时内删除相关内容,谢谢。
- Prev:《双峰VR》游戏预告片出来了,速速围观(视频)
- Back
- Next:上海普陀区出台电竞产业专项扶持政策