
 CN / EN
CN / EN
Research on Anti-Slip Interference for Wheeled Mobile Robots

In recent years, wheeled mobile robots (WMRs) have been widely employed in numerous practical scenarios due to their simple structure, flexibility, and ease of operation, particularly in applications such as exploration, transportation, and search missions. Trajectory tracking control, a core task in the motion control of WMRs, finds extensive engineering applications. However, in real-world tasks, slip disturbances significantly impair the trajectory tracking performance of WMRs, particularly on wet or slippery surfaces and during sharp turns.
Addressing this issue, the research team from the School of Automation, Southeast University, led by Professor Wang Xiangyu, has conducted research on achieving precise trajectory tracking control under slip disturbances and proposed a Virtual Reference Trajectory Scheme (VRTS) to overcome slip disturbances in WMRs. This scheme enables mobile robots to perform high-precision trajectory tracking tasks. The research paper has been published in the international SCI journal, Transactions of the Institute of Measurement and Control.
I. Research Scheme
The research team presents a virtual reference trajectory scheme based on disturbance compensation. Distinct from traditional designs that incorporate disturbance compensation within the controller, this scheme integrates slip disturbance estimation into the reference trajectory. The scheme comprises two parts: firstly, fusing the estimated slip disturbance with the reference trajectory to generate a virtual reference trajectory. Secondly, designing a controller to enable the WMR's odometry position and yaw angle to track this virtual reference trajectory, thereby enabling the WMR's actual position to track the real reference trajectory. Both simulation and experimental comparisons demonstrate the effectiveness and advantages of the proposed scheme.
Advantages of the Scheme:
Effective compensation of slip disturbances. Compensating for lateral slip disturbances in WMRs through controllers is generally challenging. In this proposed scheme, longitudinal and lateral slip disturbances are effectively compensated by integrating the slip disturbance estimation into the reference trajectory.
A concise disturbance approximation method for estimating slip disturbances. The slip disturbance estimation is derived from the error between the WMR's odometry position and its actual position. This proposed approximation method features a simple design principle, few adjustable parameters, and easier implementation in engineering.
Good compatibility of the proposed VRTS. The scheme compensates for slip disturbances by modifying the reference trajectory rather than the controller. Even existing controllers without slip disturbance compensation can be directly used with the proposed scheme. Furthermore, the nominal performance of the original controller is preserved in the absence of slip disturbances.
II. Experimental Validation
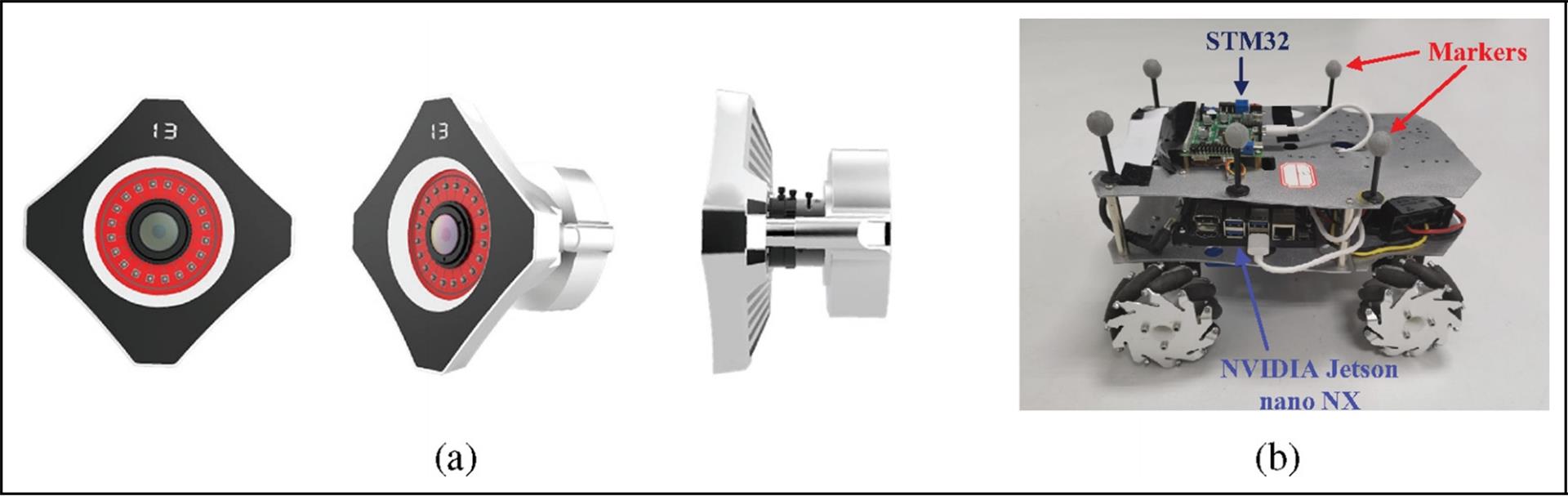
The experimental platform primarily comprises an OptiTrack motion capture system and a WMR, equipped with an Intel i7-12700H processor. The motion capture system measures the WMR's Absolute Position and Yaw Angle (APYA) by recognizing markers on the WMR and sends this data to the WMR at a frequency of 100 Hz.
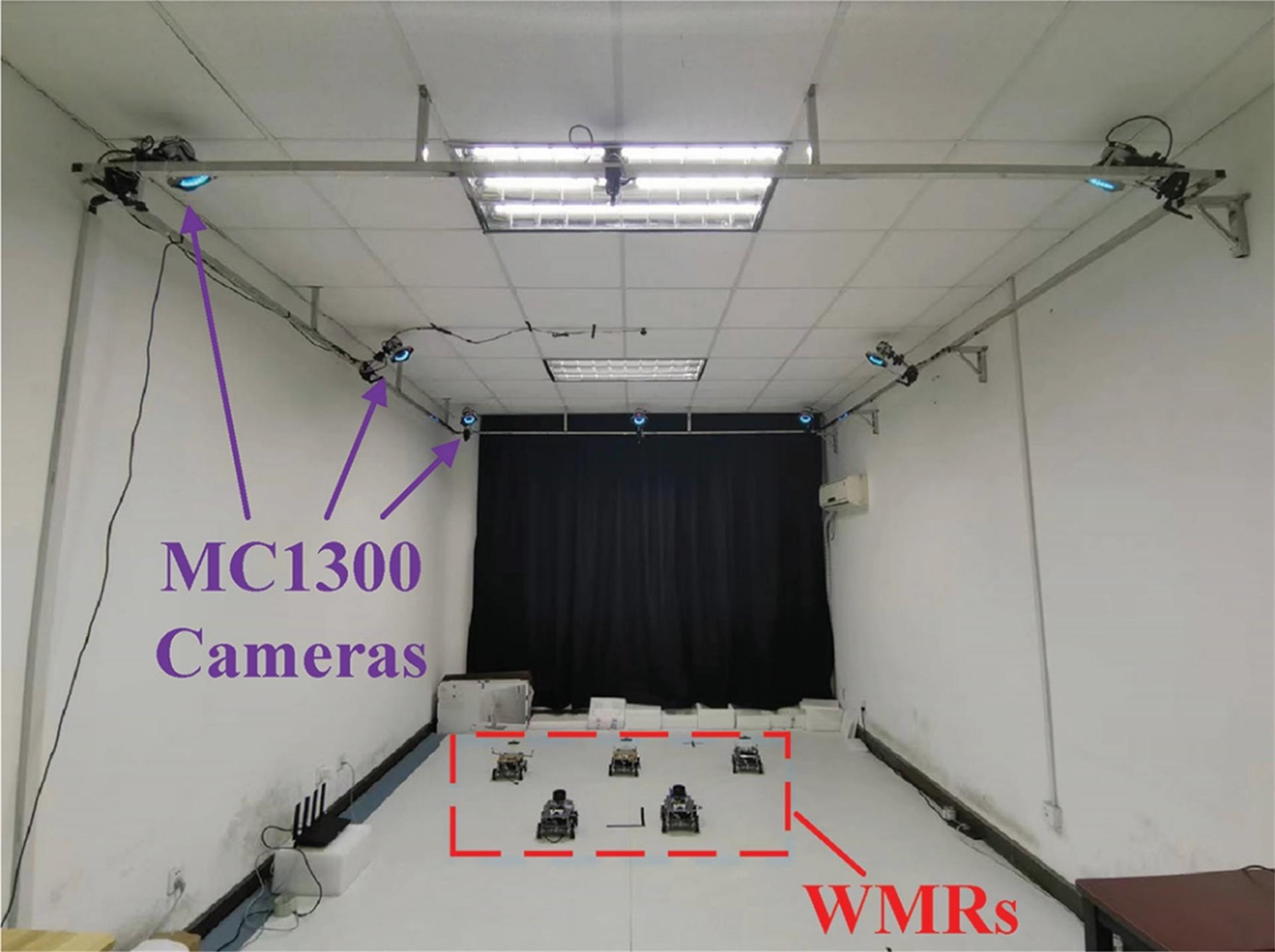
Leveraging the high precision, low latency, and full-coverage advantages of the optical motion capture system, real-time positioning and trajectory information of the WMR are collected, providing precise data references for validating the virtual reference trajectory scheme.
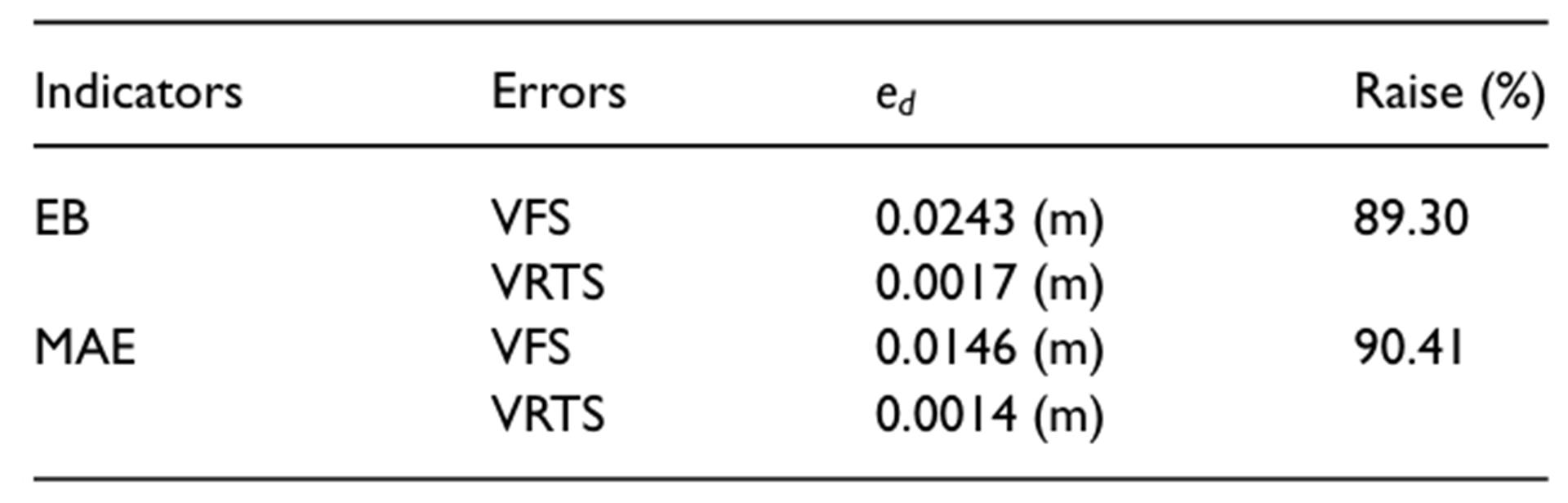
To quantitatively assess the VRTS's performance against slip disturbances, the experiment analyzed the Error Bound (EB) and Mean Absolute Error (MAE) of the distance tracking error. Comparisons between VRTS and a pure vision-based scheme (VFS) demonstrate that VRTS significantly outperforms VFS in terms of performance.
Comparison of Trajectory Tracking Performance between VRTS and VFS
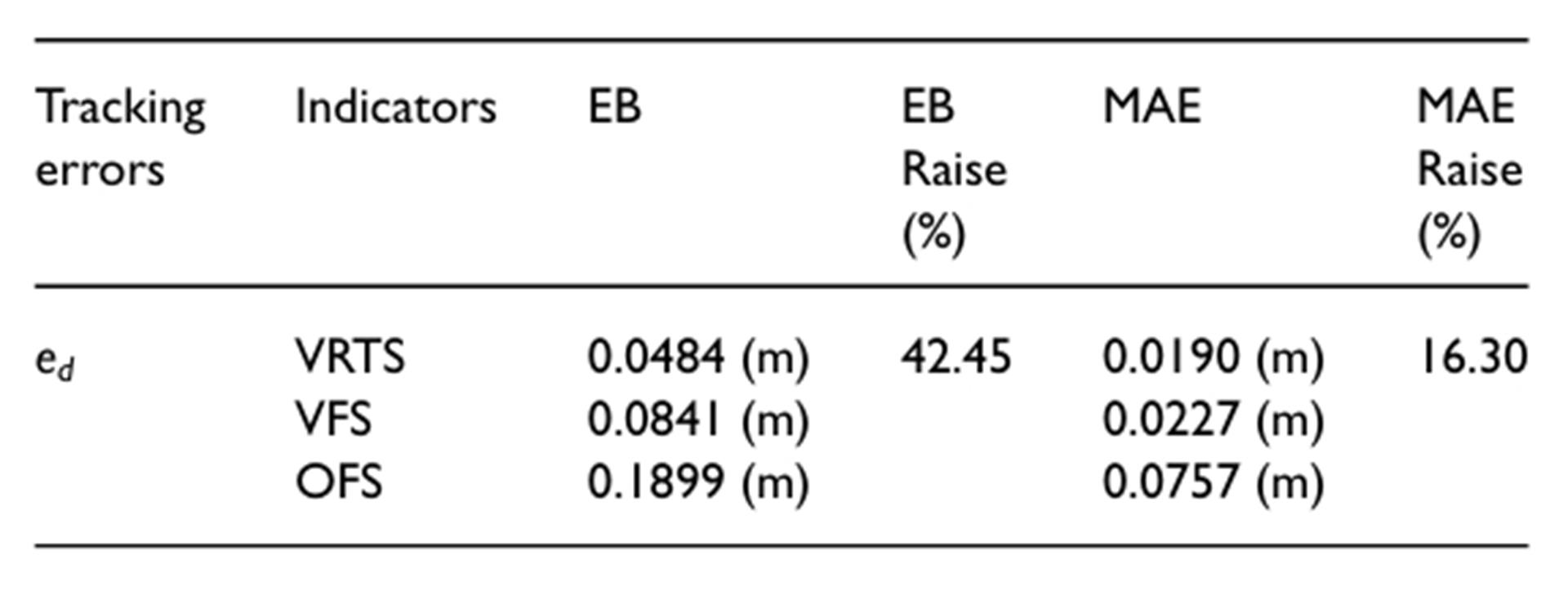
To further validate the proposed VRTS, experiments compared it with both the VFS and an odometry feedback scheme (OFS), which directly uses the WMR's pose as feedback signals to track the reference trajectory. The experiments presented specific performance metrics (i.e., EB and MAE) and demonstrated the performance improvement of VRTS over VFS.
Comparison of Trajectory Tracking Performance among VRTS, VFS, and OFS, and the Performance Enhancement of VRTS over VFS
III. Experimental Results
Through both simulation and experimental comparisons, the effectiveness and superiority of the virtual reference trajectory scheme were verified. Compared to traditional methods, this scheme not only effectively handles slip disturbances but also enables the distance tracking error to converge to zero when accurately estimating both longitudinal and lateral slips. This achievement marks another technological advancement in the field of trajectory tracking control for WMRs.
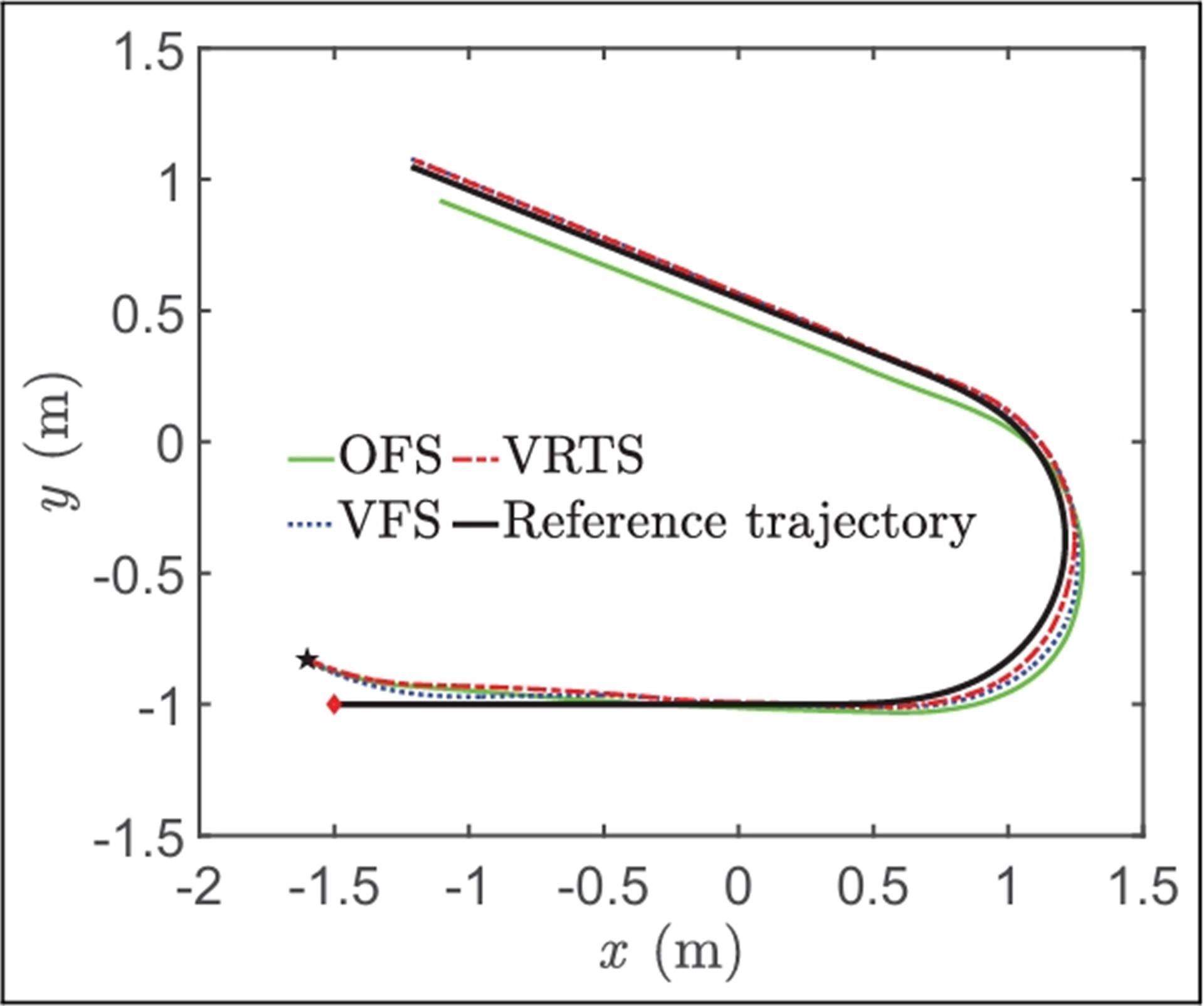
Reference Trajectory and WMR's Trajectory
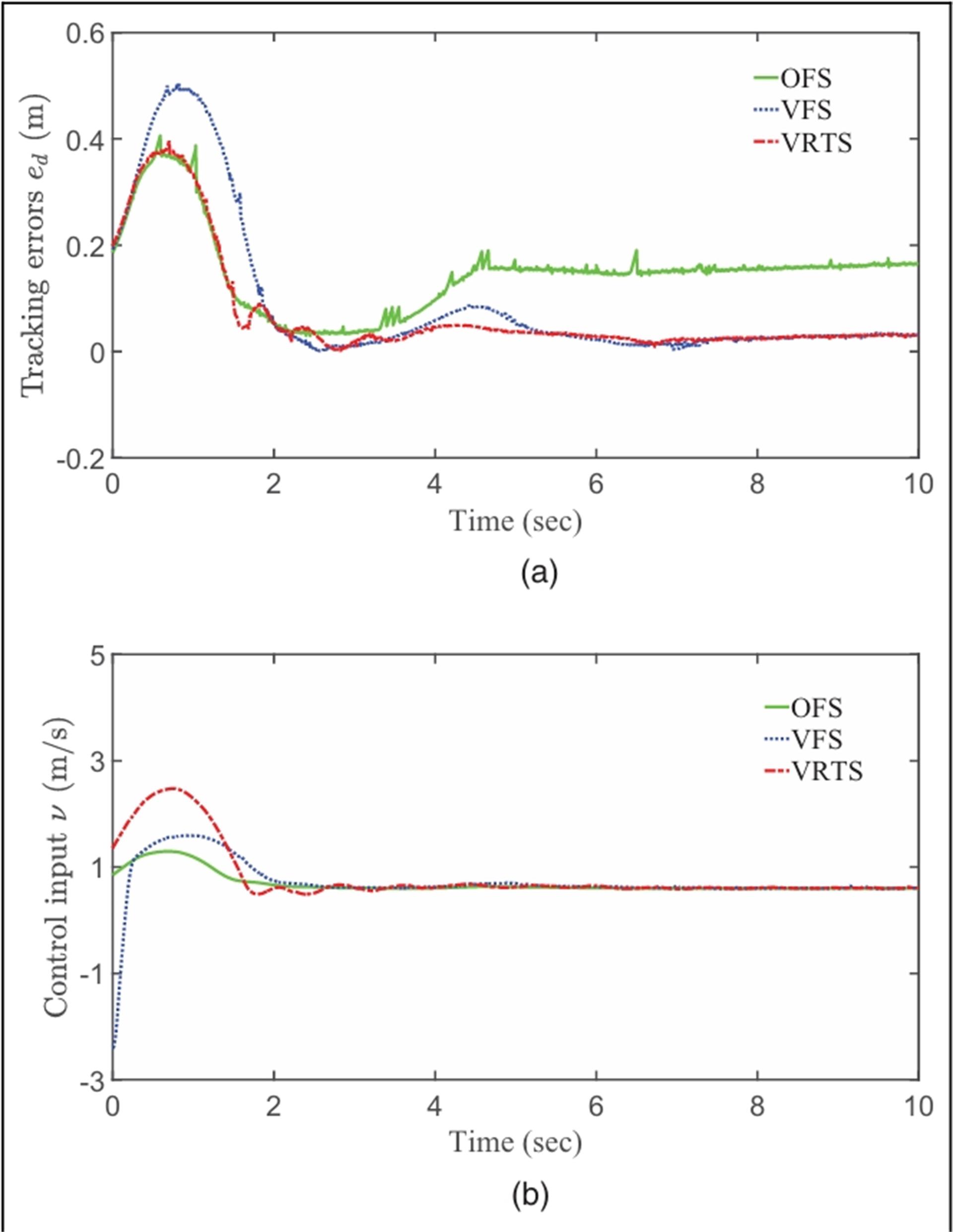
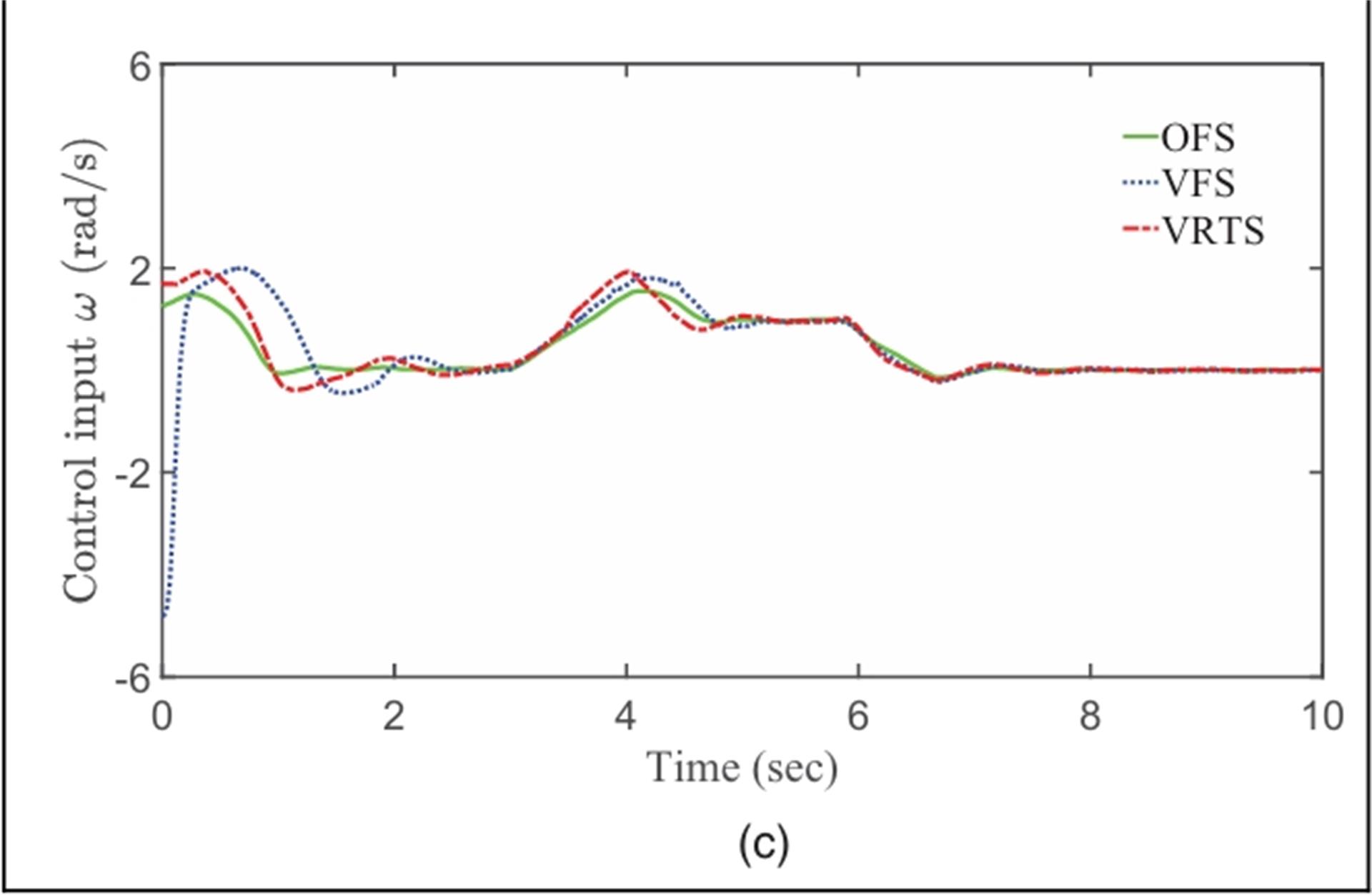
Response Curves of Distance Tracking Error ed and Time Histories of Control Inputs v and w: (a) ed, (b) v, and (c) w
Reference:
Terblanche J, Claassens S and Fourie D (2021) Multimodal navigation-affordance matching for SLAM. IEEE Robotics and Automation Letters 6(4): 7728-7735.
Saptharishi M, Oliver C, Diehl C, et al. (2002) Distributed surveillance and reconnaissance using multiple autonomous ATVs: cyberscout. IEEE Transactions on Robotics and Automation 18(5): 826–836.
Qin T, Li P and Shen S (2018) VINS-Mono: A Robust and versatile monocular visual-inertial state estimator. IEEE Transactions on Robotics 34(4): 1004–1020.
Original link:
https://journals.sagepub.com/doi/abs/10.1177/01423312241239145